


课程简介
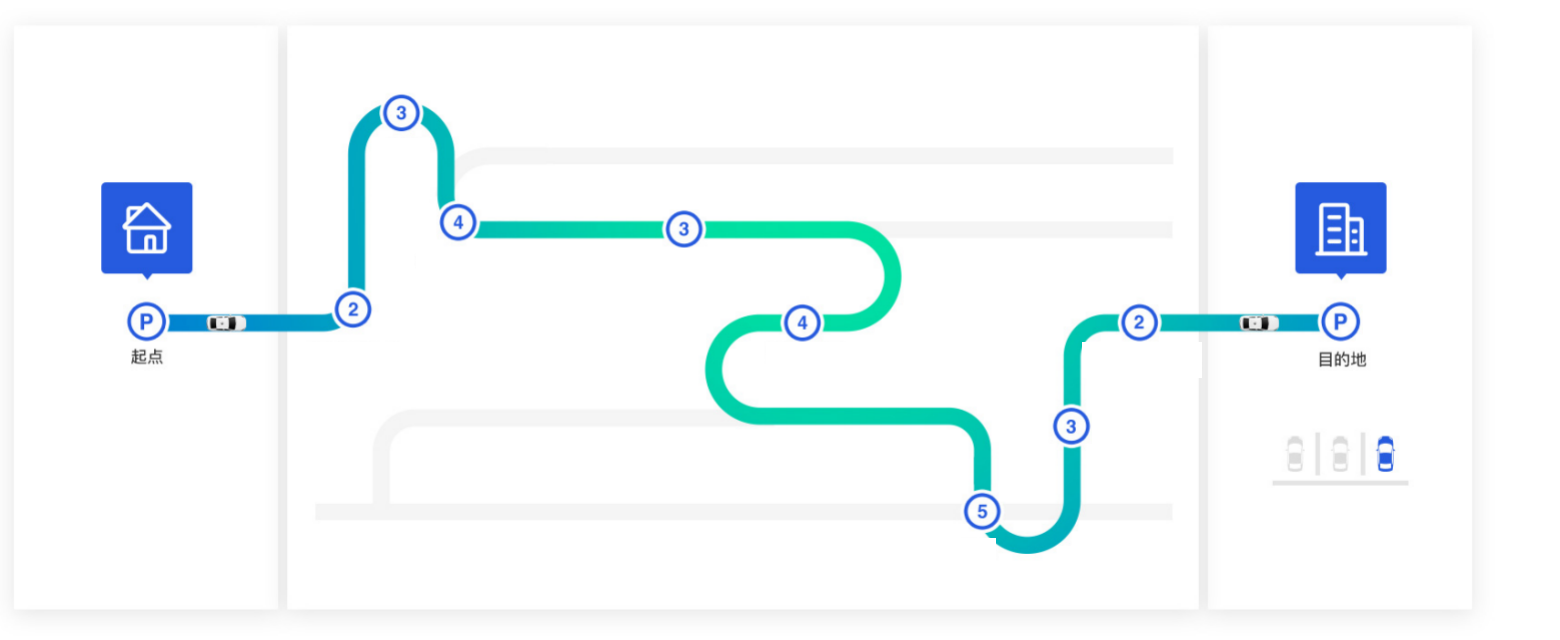
近年来随着自动驾驶技术的高速发展,L4级的自动驾驶汽车也逐渐走入大众视野。本课程基于Apollo开放平台,还原真实城市道路自动驾驶场景,如图1所示,自动驾驶车辆从起点出发,在城市道路行驶中要遵守交通规则,实现对不同障碍物的感知与决策,同时要避免急转弯、猛启急刹、画龙摇摆等情况的发生,为乘客提供舒适的乘坐体验,最后,车辆到达目的地时,自动驶入泊车区域。通过本课程,你将理解 Apollo交规决策运行机制、参考线平滑、路径规划、速度规划、开放空间规划、PID、LQR等自动驾驶典型PnC算法及场景应用,掌握使用Apollo解决实际自动驾驶实际问题的思路及方法。
无论你是自动驾驶从业者,又或者自动驾驶技术研究的高校人员,又或者您想使用Apollo自动驾驶技术参加竞赛、毕业设计、算法验证、场景仿真,这门课程都会给你们带来全新的体验,欢迎大家一起学习交流!
适用人群
- 熟悉自动驾驶技术、有志愿从事自动驾驶行业的企业从业者以及自动驾驶技术研究的高校人员。
前置知识
- 请优先完成《Apollo星火计划2.0》课程学习,熟悉Apollo各模块的运行机制及代码结构,掌握Apollo自动驾驶调试及仿真方法。
课程交流
①、可在社区https://studio.apollo.auto/community/article/172讨论帖下留言,我们讲及时回答。
②、加入课程后,请扫码加入课程官方QQ群(群号)答疑交流。加入课程后,扫描下方二维码添加Apollo小哥哥,发送课程名称“Apollo自动驾驶入门课”即可加入学习交流群。
