Beta解读|【工具方向】全新Dreamview+,便捷灵活更丰富
Apollo新版本Beta已于11月6日正式开启公测。
在新版本Beta中,我们对Apollo开发者工具Dreamview进行了一系列的技术升级和功能拓展,带来了全新的Dreamview+。
今天为各位开发者带来最新的Dreamview+升级解读。
Dreamview+ 新特性

新版Dreamview+在多场景使用、自由布局、数据资源、语言支持四个方面进行了全面提升:
- 基于模式的多场景——流程更简洁:以感知、PnC等具体开发场景作为模式分类,精简各类模式下的操作步骤,优化使用流程,提升开发效率;
- 基于面板的布局——可视化更灵活:支持自由配置可视化面板的布局、各面板内容以及大小,使开发者能创建符合自身工作流的操作界面;
- 集成云端资源中心——取用更方便:数据资源集中,可便捷管理和迅速取用,同时进一步加强与 Studio 云端资源互动,可一键下载各类资源用于算法测试,包括地图、场景、车辆配置、数据包等,进一步丰富开发者资源库。
- 新人引导与中英切换——上手更轻松:可视化提供使用引导,协助新开发者快速学习操作流程及步骤,降低学习和探索成本;全量功能支持中英切换,降低专业名词理解难度,响应国内外开发者诉求
一、基于模式的多场景——流程更简洁
全新Dreamview+从感知、PnC等不同业务研发场景出发,根据不同场景的操作方式与开发流程,设计了默认模式、感知模式、PnC模式三种场景模式,开发者可以在三种模式之间随意切换,选择适应自身需求的模式进行自动驾驶开发,增强了场景针对性,同时极大提升了开发效率。以下是三种模式的介绍:
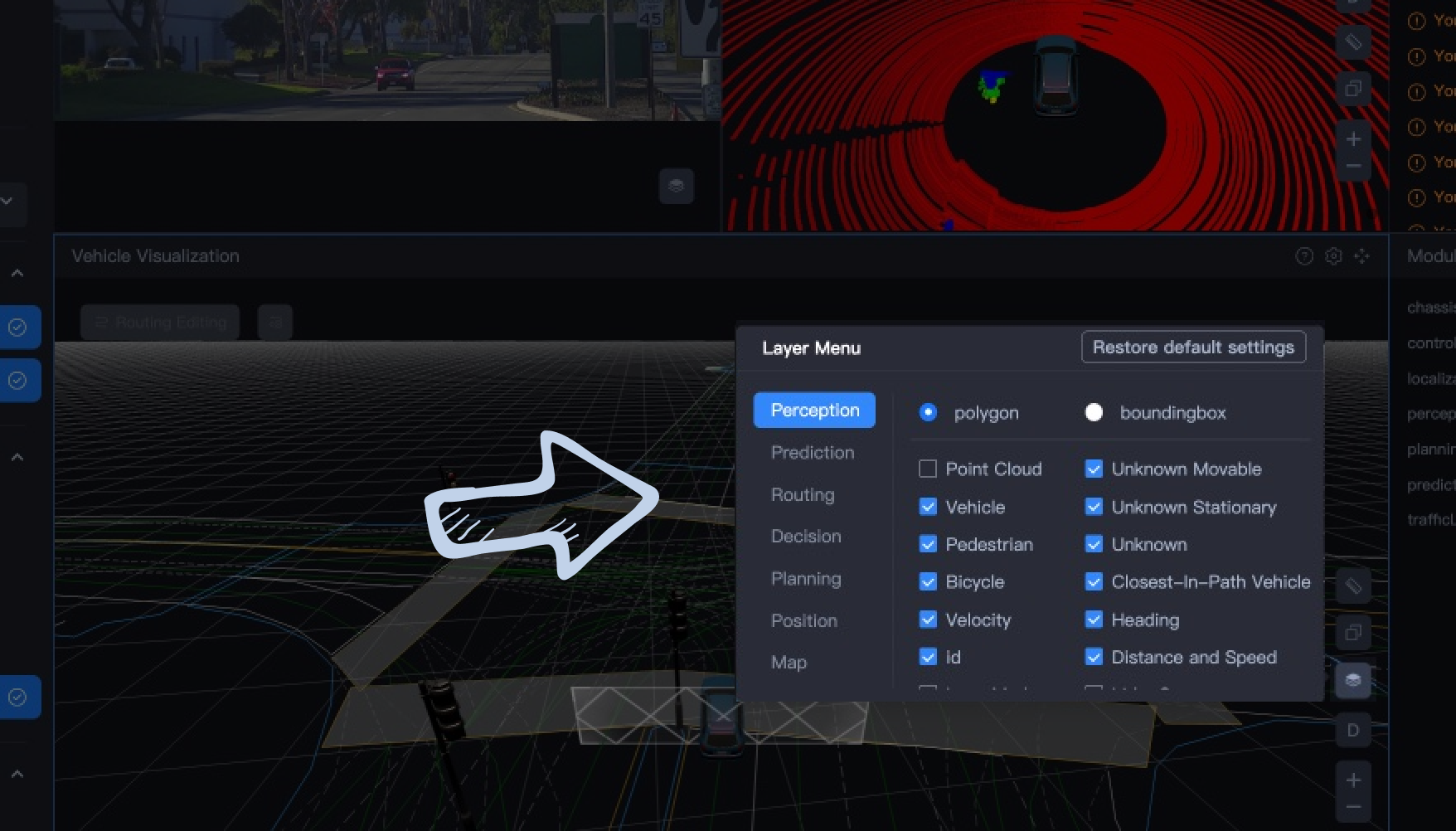
- 感知模式
在感知业务研发场景中,开发者的主要目标是查看各种传感器数据,观测感知输出的障碍物等结果是否符合预期,从而迭代优化算法。
- 原始数据查看:完成从单传感器窗口到多传感器窗口的升级,可同步播放多个摄像头数据和激光雷达数据,支持多种传感器感知方案。

- 感知结果查看:支持切换channel查看感知中间态数据、查看障碍物识别结果数据;支持以车辆、行人等不同障碍物类型作为筛选条件;调整需要查看的障碍物信息。
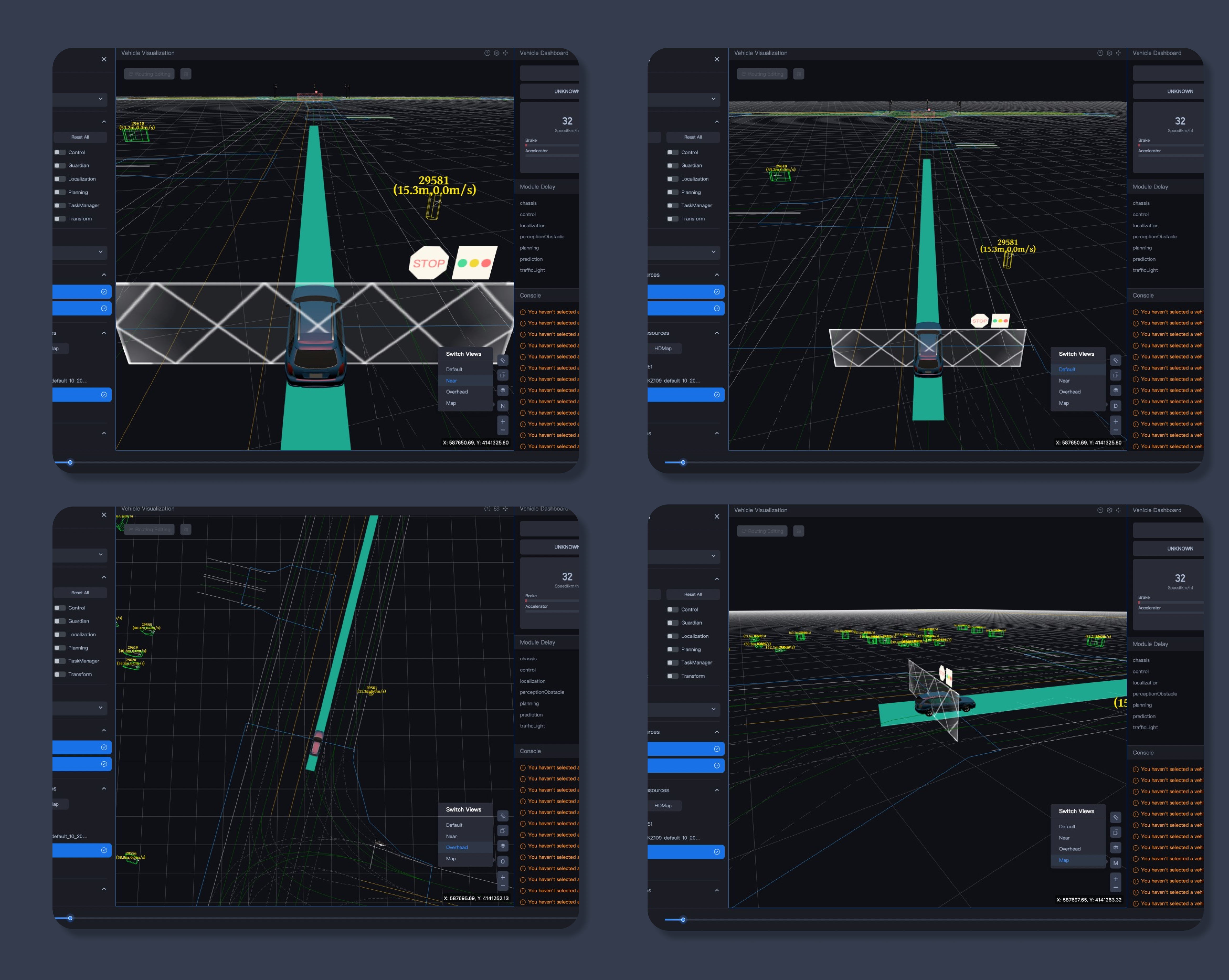
- 地图视角调节:支持多视角调整地图,便捷移动视角远近。
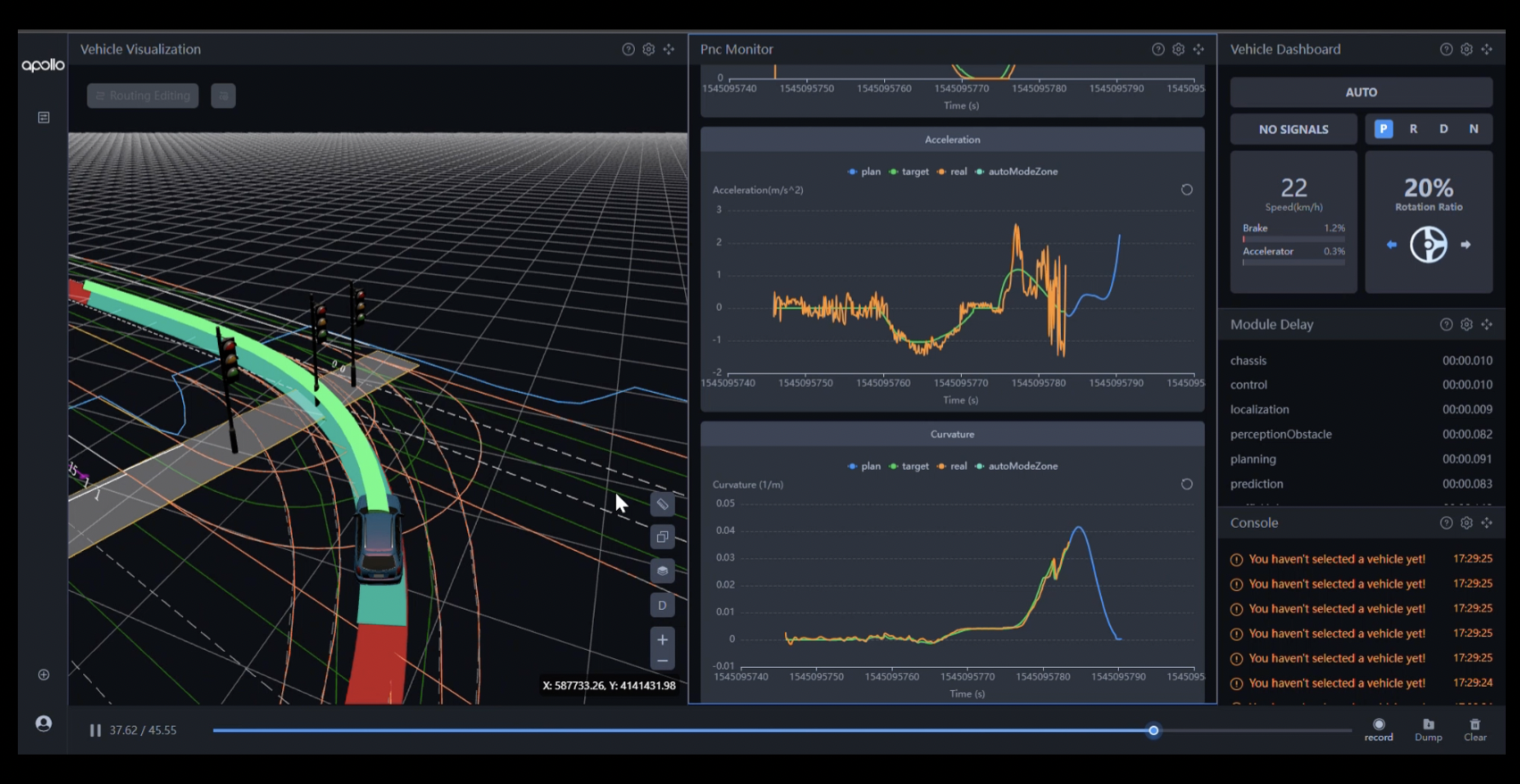
- PnC模式
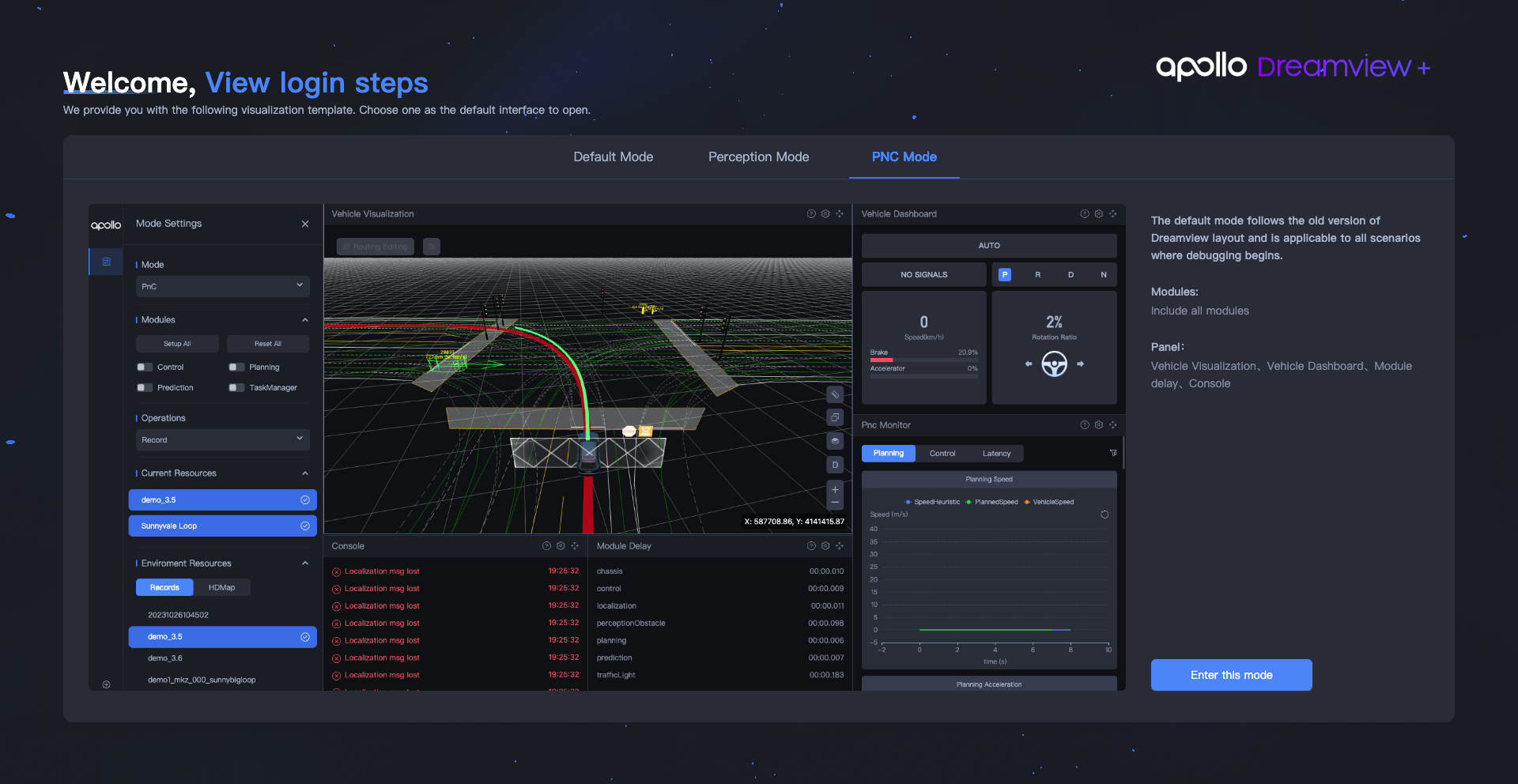
在PnC业务研发场景中,开发者的主要目标是查看规控输出是否能符合预期结果,例如观测规划路线是否发生碰撞、速度调节是否合理等,从而迭代优化算法。
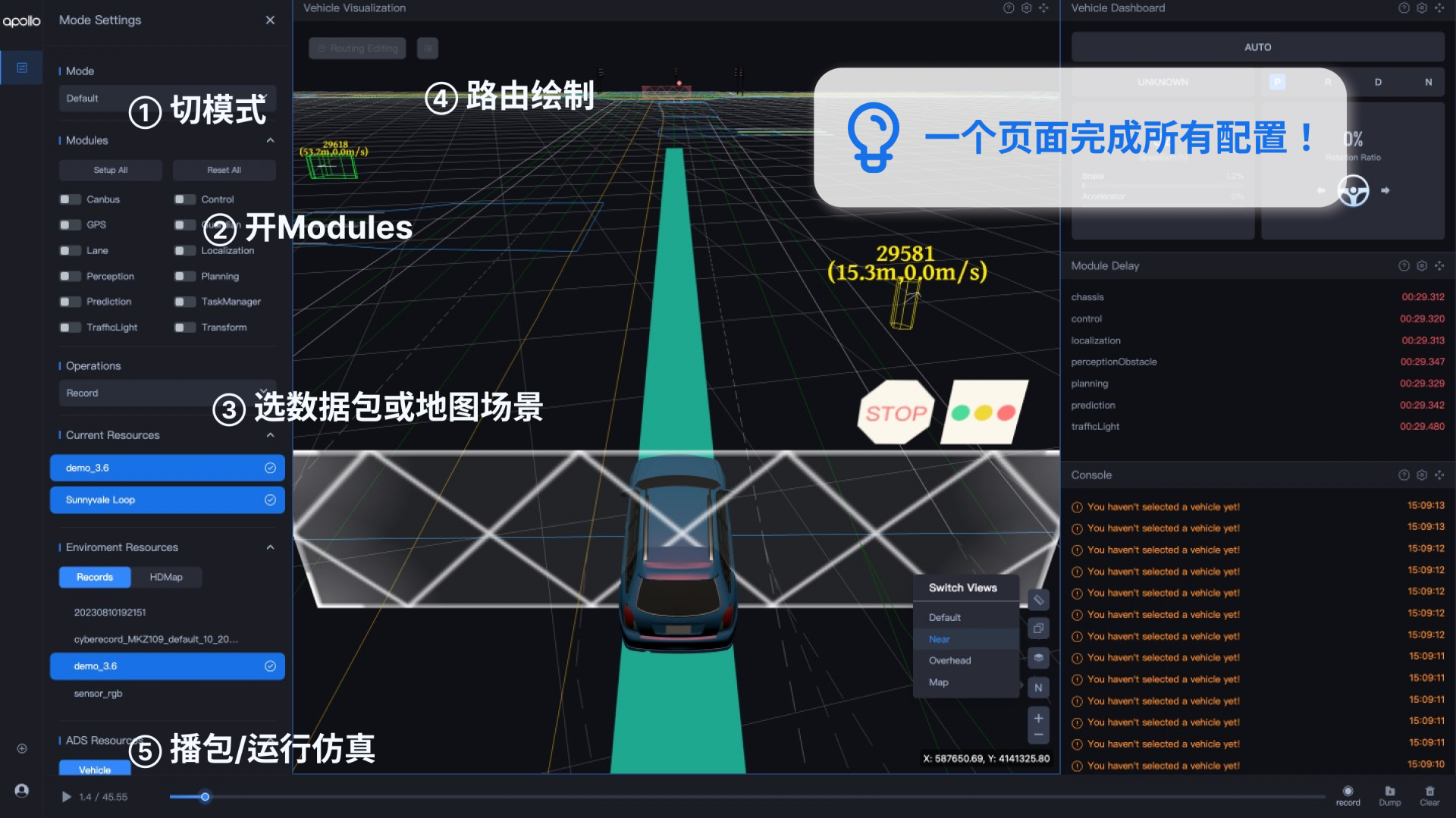
- 调试流程简化:相对于旧版DV,全新Dreamview+在同一页面即可顺序完成PnC调试配置,减少配置步骤。
- 车辆数据监测:支持图表类型筛选,支持曲线上数据点的查看,以便于更好地观测算法表现 。
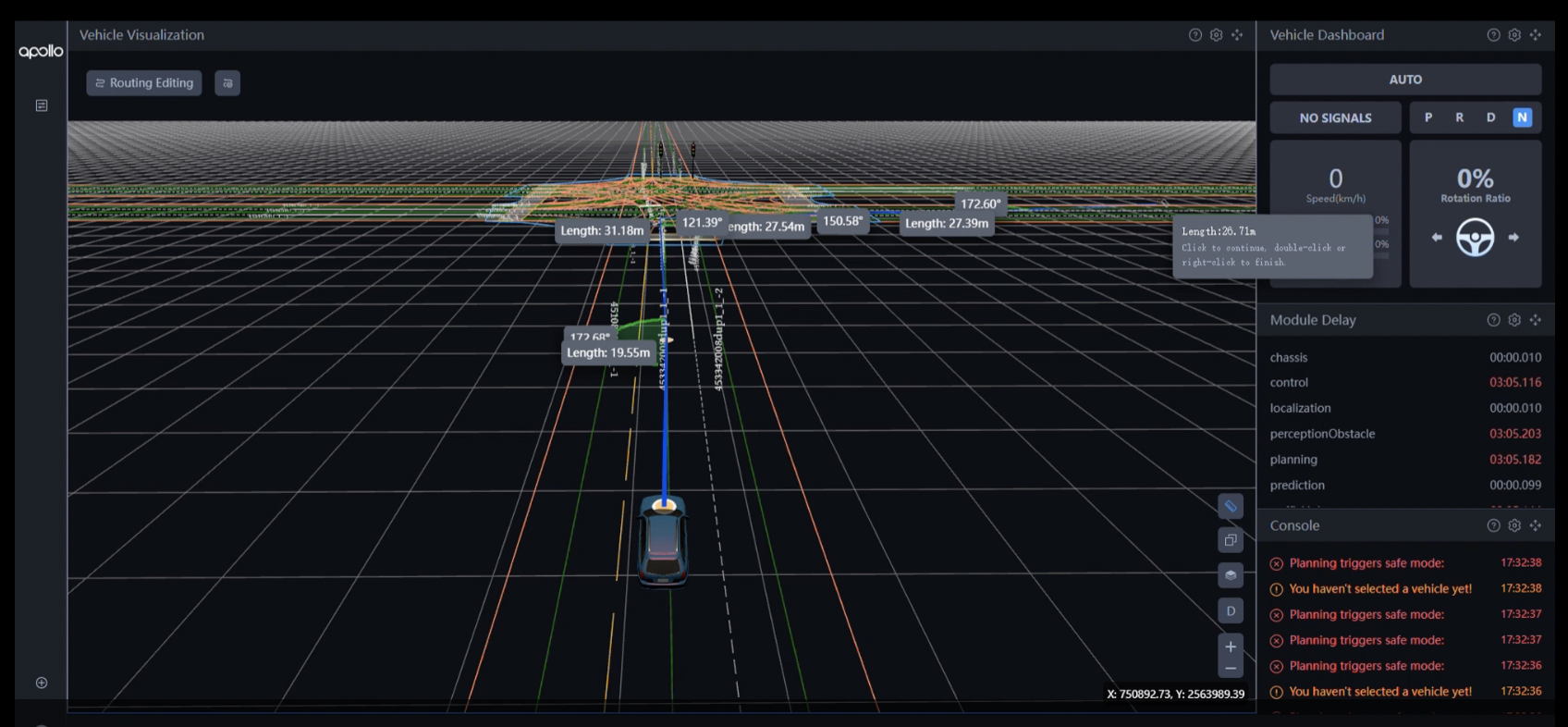
- 优化路由绘制:区分起点和途径点,支持保存常用路由,可快捷地在地图上绘制一系列点,方便地将数据发送到规划算法。
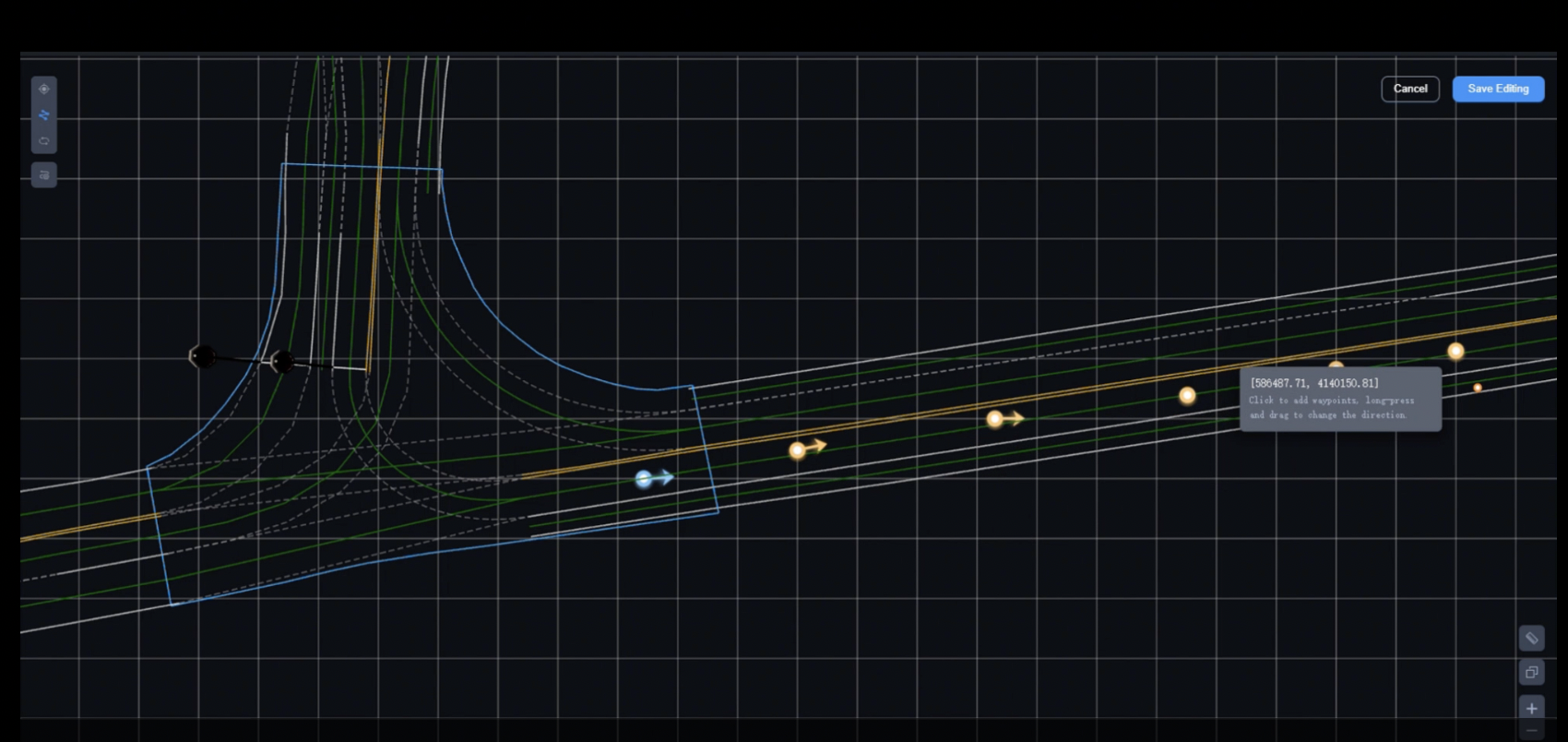
- 测距与复制坐标:支持测量两点之间的距离,或多个点组成的折线长度总和,可以用于确定一段路程的长度,同时支持将这段路中的地图坐标点信息复制到剪贴板中,便捷地传递到算法。
- 默认模式
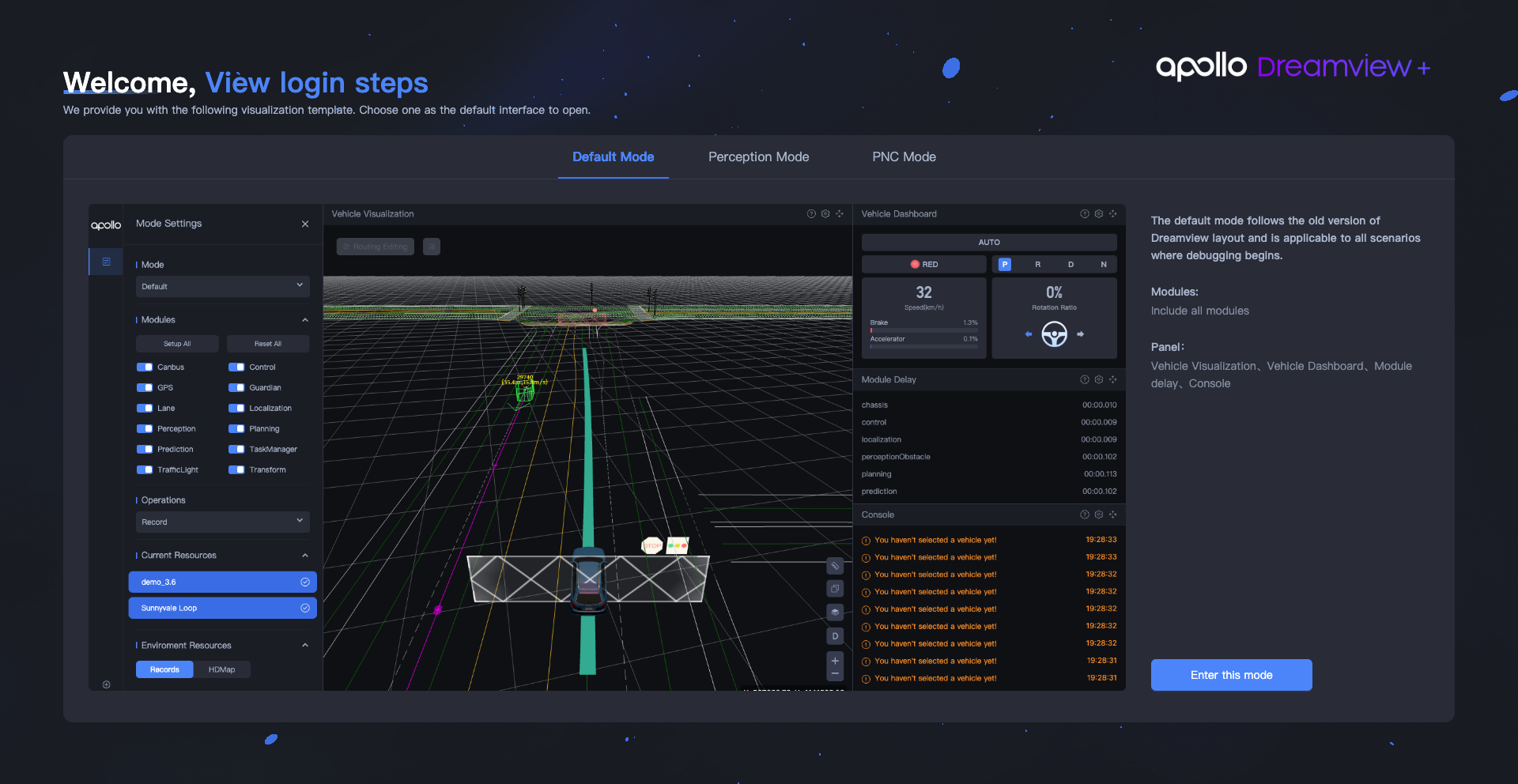
全新Dreamview+默认模式适合通用开发场景,具备所有模块与面板,开发者可以自主配置和调试,打造自己专属的开发流程。
二、基于面板的布局——可视化更灵活
全新Dreamview+中,开发者可以自由地定义内容和布局,以适应不同的使用习惯和需求。开发者既可以通过拖拽的方式添加面板、一键复制和删除面板,也可以自由设置面板的数量及位置,以及修改面板布局。这些功能使得可视化区域更加灵活和可定制化,数据可视化和数据分析更加高效。


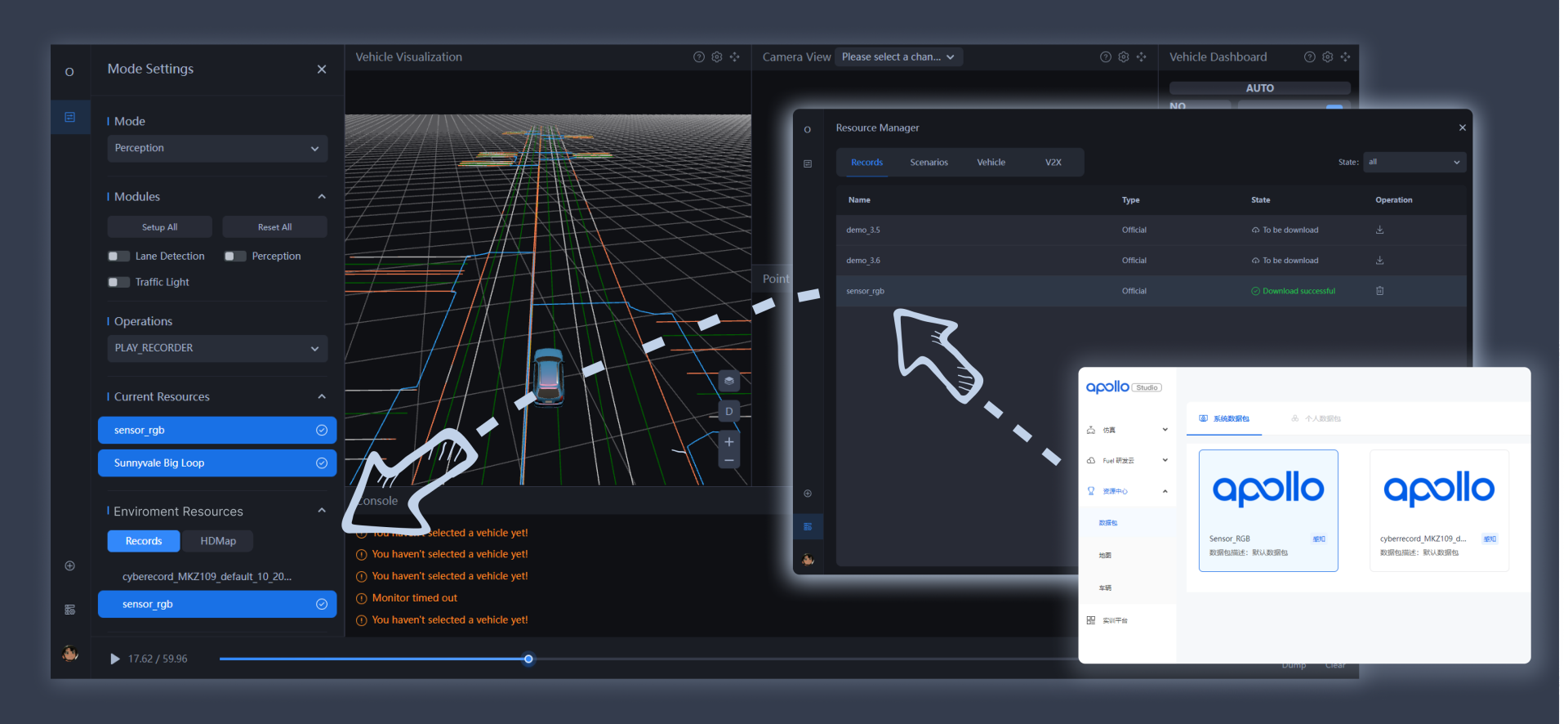
三、集成云端资源中心——取用更方便
在8.0版本基础上,全新Dreamview+整合了本地和云端资源,带来了全新的资源中心。资源中心的资源类型包括地图、场景、车辆等各类资源,通过资源中心,开发者可以更好地管理和调试资源,从而提高开发效率和系统性能。

在全新Dreamview+中,开发者可以使用资源中心的同步功能,将Apollo Studio云端工作台中的数据同步到本地,包括地图、场景、车辆配置、数据包等资源,避免了手动上传和下载资源的麻烦。同时,Dreamview+资源中心还可以实时同步各类资源的更新状态,以便开发人员快速地进行算法的迭代测试和调试。
四、新人引导与中英切换——上手更轻松
根据各模式开发需求可视化提供使用引导,协助新开发者快速学习操作流程及步骤,降低学习和探索成本。

全量功能支持中文与英文版本切换,降低专有名词理解难度,响应国内外开发者使用诉求。

Dreamview+对比总结