理解Planing 2.0插件机制 - 新增traffic rule插件
本节课,以车辆在行进过程中,驶入需限速的交汇路口为例,向大家介绍Planning模块插件机制,以及针对该交汇路口限速场景,教大家新建自定义插件,实现在指定区域的限速功能。

1 traffic rule 插件概述
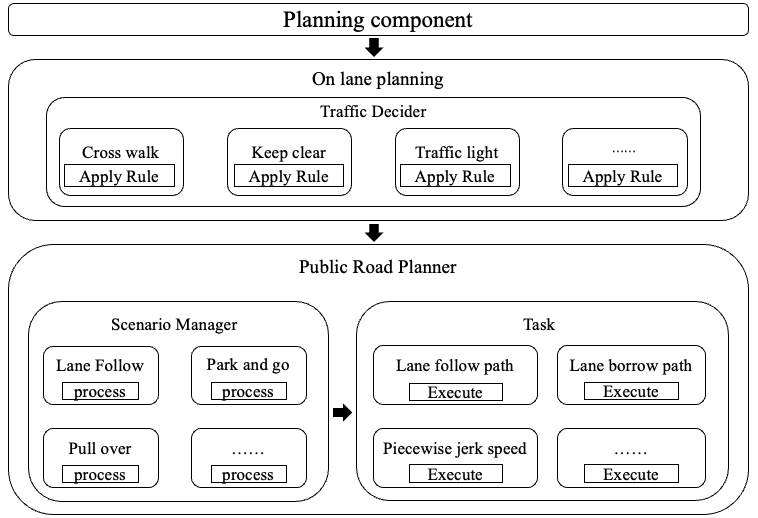
planning插件分为scenario、task、traffic rule三类,各类插件的使用场景如下图所示。本节课我们将针对如何新增一个traffic rule插件展开讲解。
三类插件的作用:
- Traffic rule用于处理各种交通规则,并将各类规则转化为停车(生成虚拟障碍物实现)、限速两种输出类型。
- Scenario用于判断车辆所在场景,而后依据不同的场景调用事先定义的Task组合。
- Task用于执行执行具体任务,如生成借道路径、处理障碍物边界、轨迹优化等。
三者的调用逻辑如下图所示。
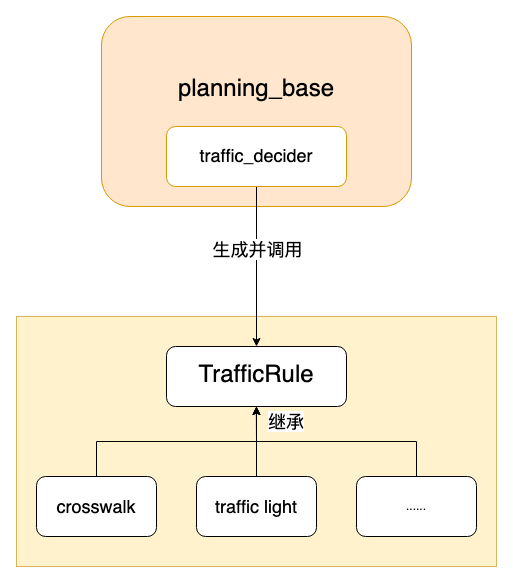
traffic rule插件的生成与调用逻辑如下图所示。traffic rule插件继承自traffic rule基类,而后由planning_base中的traffic_decider对各个插件进行生成并调用。planning每进行一次规划任务,会通过traffic_decider调用各个traffic rule,从而使traffic rule插件生效。
2 新增插件配置流程
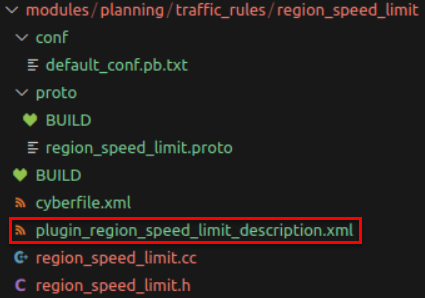
以region_speed_limit插件为例,一个完整的traffic rule插件文件夹目录结构以及各个文件功能如下所示。
执行下述命令,在指定位置生成初始插件文件夹。
buildtool create --template plugin \--namespaces planning \--name region-speed-limit \--base_class_name TrafficRule modules/planning/traffic_rules/region_speed_limit \--config_message_name RegionSpeedLimitConfigbuildtool profile config init --package planning --profile=default && aem profile use default
生成的插件文件夹下文件结构如下所示。
└── region_speed_limit├── region_speed_limit.cc //region_speed_limit插件源码├── region_speed_limit.h //region_speed_limit插件源码├── conf│ └── default_conf.pb.txt //region_speed_limit插件参数配置文件├── proto│ ├── region_speed_limit.proto //region_speed_limit插件参数配置文件数据结构声明文件│ └── BUILD //proto文件编译规则声明文件├── BUILD //region_speed_limit插件编译规则声明文件├── plugin_region_speed_limit_description.xml //region_speed_limit插件类声明文件└── cyberfile.xml //region_speed_limit插件版本信息声明文件
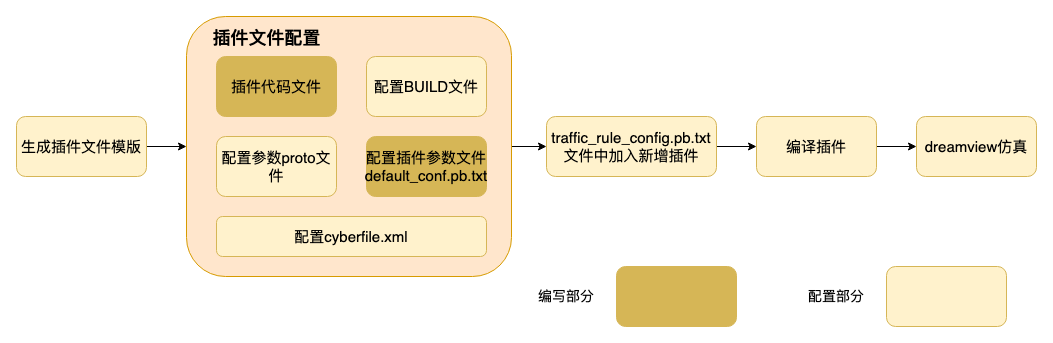
在上述插件目录下,新建一个traffic rule插件流程如下图所示,主要包括了配置插件相关文件、在traffic_rule_config.pb.txt中加入新增插件。
3 traffic rule插件实践案例
问题:当无人车驶入交汇路口,有限速要求。对此,apollo planning模块应该如何处理?
目的:新建区域限速交规插件,实现无人车在交汇路口限速行驶。
实践内容:
新增交汇路口限速traffic rule插件实践:
- 目标:实现车辆在指定区域低于指定速度行驶。
- 方法:新增交汇路口限速traffic rule插件。
- 结果:在dreamview上实时查看车辆行驶过路口的速度情况,验证是否符合要求。
实践目的:
学习traffic rule新增插件流程,掌握开发traffic rule插件步骤,使学员具有新建自定义插件能力。
实践流程:
- 新建交汇路口限速插件实践:
- a. 指定位置新建插件region_speed_limit文件夹。
- b. 根据要求,配置相应插件文件与traffic_rule_config.pb.txt。
- 配置RegionSpeedLimit类代码文件以及相应BUILD文件
- 配置参数文件以及BUILD文件
- 配置插件参数文件default_conf.pb.txt
- 配置cyberfile.xml
- 配置plugins.xml
- traffic_rule_config.pb.txt中加入新增插件
- c. 编译region_speed_limit插件。
- d. 运行车辆规划模块,并在dreamview上观察车辆驶入交汇路口的速度变化。
3.1 生成插件文件模版
输入下述指令,在modules/planning/traffic_rules/下新建插件文件夹region_speed_limit。
buildtool create --template plugin \--namespaces planning \--name region-speed-limit \--base_class_name TrafficRule modules/planning/traffic_rules/region_speed_limit \--config_message_name RegionSpeedLimitConfig
3.2 写RegionSpeedLimit类代码文件以及配置相应BUILD文件
#include <memory>#include "modules/planning/traffic_rules/region_speed_limit/region_speed_limit.h"namespace apollo {namespace planning {/* 定义成员函数*/using apollo::common::Status;using apollo::hdmap::PathOverlap;bool RegionSpeedLimit::Init(const std::string& name, const std::shared_ptr<DependencyInjector>& injector) {if (!TrafficRule::Init(name, injector)) {return false;}// Load the config this task.return TrafficRule::LoadConfig<RegionSpeedLimitConfig>(&config_);}Status RegionSpeedLimit::ApplyRule(Frame* const frame, ReferenceLineInfo* const reference_line_info) {ReferenceLine* reference_line = reference_line_info->mutable_reference_line();const std::vector<PathOverlap>& pnc_junction_overlaps= reference_line_info->reference_line().map_path().pnc_junction_overlaps();for (const auto& pnc_junction_overlap : pnc_junction_overlaps) {reference_line->AddSpeedLimit(pnc_junction_overlap.start_s - config_.forward_buffer(),pnc_junction_overlap.end_s + config_.backward_buffer(),config_.limit_speed());}return Status::OK();}} // namespace planning} // namespace apollo
- Init()函数:初始化RegionSpeedLimit类,读取配置文件信息到config_;
- ApplyRule()函数:traffic rule类调用接口,在运行中实际调用的函数;
- reference_line_info->reference_line().map_path():获取道路信息,本插件获取了交汇路口信息pnc_junction_overlaps();
- 针对交汇路口的限速功能,调用了ReferenceLine::AddSpeedLimit(double start_s, double end_s, double speed_limit),实现了在start_s处到end_s处最高速度为speed_limit的约束。
#pragma once#include <memory>#include "cyber/plugin_manager/plugin_manager.h"/* 添加了相应的头文件*/#include "modules/common/status/status.h"#include "modules/planning/traffic_rules/region_speed_limit/proto/region_speed_limit.pb.h"#include "modules/planning/planning_interface_base/traffic_rules_base/traffic_rule.h"namespace apollo {namespace planning {class RegionSpeedLimit : public TrafficRule {/* 声明成员函数*/public:bool Init(const std::string& name, const std::shared_ptr<DependencyInjector>& injector) override;virtual ~RegionSpeedLimit() = default;common::Status ApplyRule(Frame* const frame, ReferenceLineInfo* const reference_line_info);void Reset() override {}private:RegionSpeedLimitConfig config_;};CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::planning::RegionSpeedLimit, TrafficRule)} // namespace planning} // namespace apollo
Reset()函数:插件变量重置入口,清空上一次决策对插件内变量的更改。
CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::planning::RegionSpeedLimit,TrafficRule):声明该类为插件。
BUILD文件描述了源码的构建规则以及其依赖。
load("@rules_cc//cc:defs.bzl", "cc_binary", "cc_library")load("//tools:apollo.bzl", "cyber_plugin_description")load("//tools:apollo_package.bzl", "apollo_cc_library", "apollo_package", "apollo_plugin")load("//tools/proto:proto.bzl", "proto_library")load("//tools:cpplint.bzl", "cpplint")package(default_visibility = ["//visibility:public"])filegroup(name = "region_speed_limit_files",srcs = glob(["conf/**",]),)apollo_plugin(name = "libregion_speed_limit.so",srcs = ["region_speed_limit.cc",],hdrs = ["region_speed_limit.h",],description = ":plugins.xml",deps = ["//cyber",# 添加该插件所需依赖"//modules/planning/planning_interface_base:apollo_planning_planning_interface_base","//modules/planning/traffic_rules/region_speed_limit/proto:region_speed_limit_proto",],)apollo_package()cpplint()
load():声明编译中使用的相关依赖
filegroup():声明文件组,编译后会将其安装到相应位置。
apollo_plugin():声明编译动态库、编译源码文件、插件描述文件、依赖。
plugin_region_speed_limit_description.xml
plugin_region_speed_limit_description.xml文件修改成plugins.xml文件
plugins.xml文件内容
<library path="modules/planning/traffic_rules/region_speed_limit/libregion_speed_limit.so"><class type="apollo::planning::RegionSpeedLimit" base_class="apollo::planning::TrafficRule"></class></library>
3.3 配置参数文件
修改proto文件的region_speed_limit.proto
syntax = "proto2";package apollo.planning;message RegionSpeedLimitConfig {// 声明RegionSpeedLimitConfig中的数据结构optional double forward_buffer = 1 [default = 3];optional double backward_buffer = 2 [default = 2];optional double limit_speed = 3 [default = 5];}
region_speed_limit.proto 文件声明了该插件配置文件的数据结构。
BUILD 文件声明了该proto文件的编译规则。
3.4 写插件参数文件default_conf.pb.txt
conf文件夹,region_speed_limit.pb.txt修改成default_conf.pb.txt
forward_buffer: 3.0backward_buffer: 2.0limit_speed: 15.0
3.5 配置cyberfile.xml
<package format="2"><name>region-speed-limit</name><version>local</version><description>This is a demo package</description><maintainer email="[email protected]">Apollo Developer</maintainer><license>Apache License 2.0</license><url type="website">https://www.apollo.auto/</url><url type="repository">https://github.com/ApolloAuto/apollo</url><url type="bugtracker">https://github.com/ApolloAuto/apollo/issues</url><type>module</type><src_path>//modules/planning/traffic_rules/region_speed_limit</src_path><builder>bazel</builder><depend type="binary" repo_name="cyber">cyber</depend><!-- add new dependency--><depend type="binary" repo_name="planning-interface-base">planning-interface-base</depend><depend>bazel-extend-tools</depend></package>
声明文件版本等信息
3.6 traffic_rule_config.pb.txt中加入新增插件
将新建插件加入traffic rule配置文件中,从而使planning调用该traffic rule。
rule {name: "BACKSIDE_VEHICLE"type: "BacksideVehicle"}rule {name: "CROSSWALK"type: "Crosswalk"}rule {name: "DESTINATION"type: "Destination"}rule {name: "KEEP_CLEAR"type: "KeepClear"}rule {name: "REFERENCE_LINE_END"type: "ReferenceLineEnd"}rule {name: "REROUTING"type: "Rerouting"}rule {name: "STOP_SIGN"type: "StopSign"}rule {name: "TRAFFIC_LIGHT"type: "TrafficLight"}rule {name: "YIELD_SIGN"type: "YieldSign"}rule {name: "SPEED_SETTING"type: "SpeedSetting"}rule {name: "REGION_SPEED_SETTING"type: "RegionSpeedLimit"}
3.7 编译插件
执行以下命令编译插件
buildtool build -p modules/planning/traffic_rules/region_speed_limit/
3.8 运行场景并调试参数
终端执行以下命令运行dreamview。
aem bootstrap start --plus
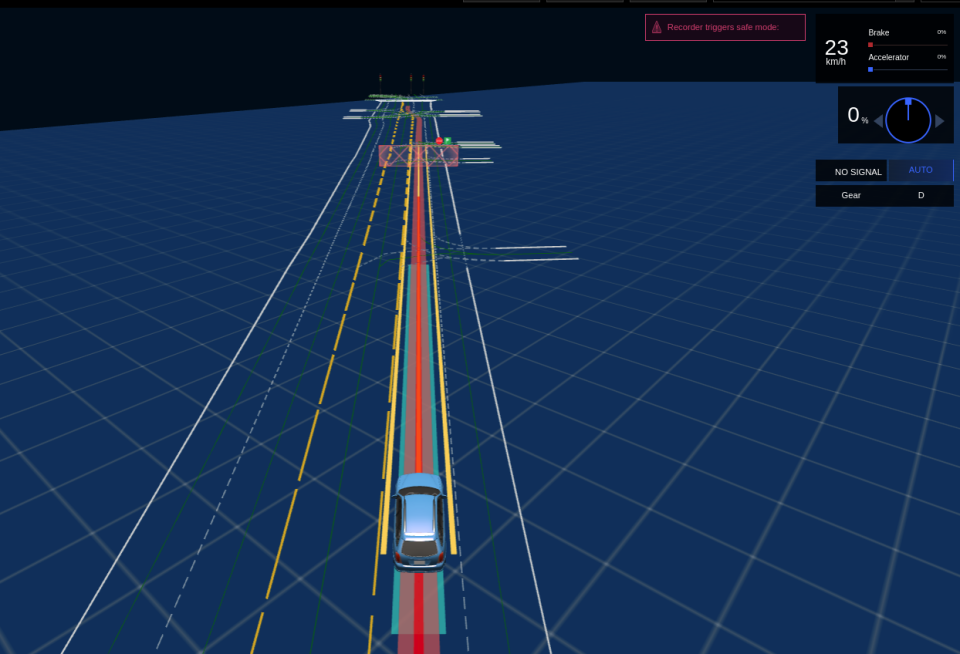
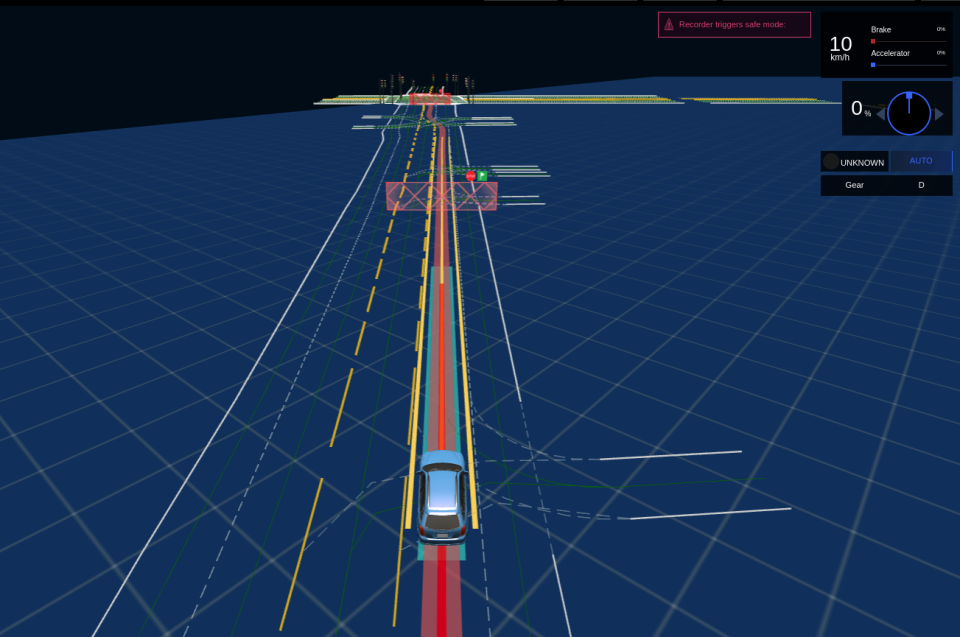
设置default_conf.pb.txt中limit_speed为3,使路口交汇处限速3m/s。
如左图所示,到达路口前速度为23km/h,车辆正常行驶,到交汇路口后,如右图所示,速度降为10km/h,实现了交汇路口限速功能。