第四章:Cyber RT之调度简介与实践
Cyber RT调度整体介绍
随着人工智能技术的不断发展,自动驾驶汽车已经开始变为可能。自动驾驶汽车需要同时完成多项任务,包括定位、感知、规划、控制等。如何合理调度编排这些任务,让它们运行得稳定、高效,是我们今天介绍的主要内容。
操作系统调度策略
操作系统进行调度的目的是为了最大化利用系统资源(特别是CPU资源)。调度往往是对有限资源的妥协,本质是为了:效率最大化,兼顾公平。
调度改变了什么?
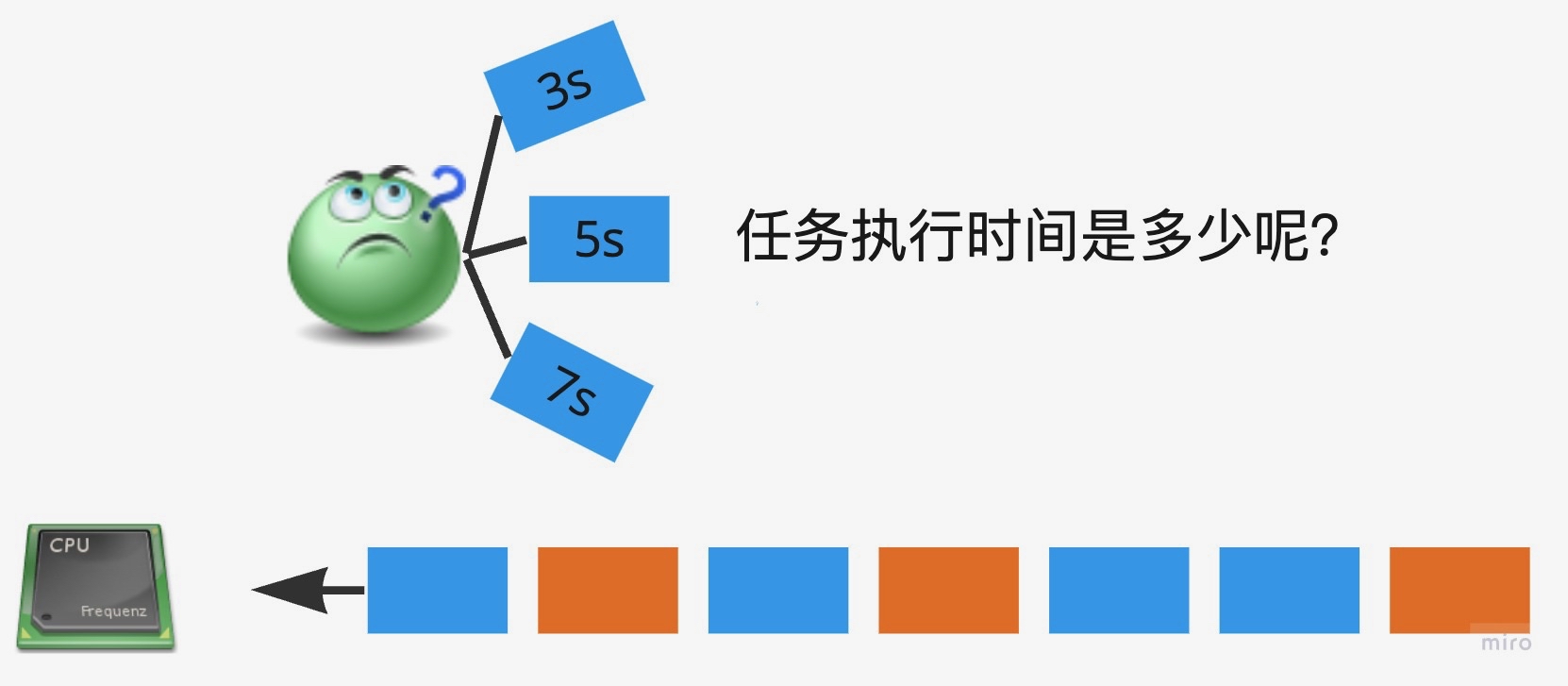
先看以下的例子,有252个任务,当一个任务执行完成之后,再开始执行另一个任务,252个任务的执行时间分别为10s,6s和4s,我们应该如何编排任务呢?
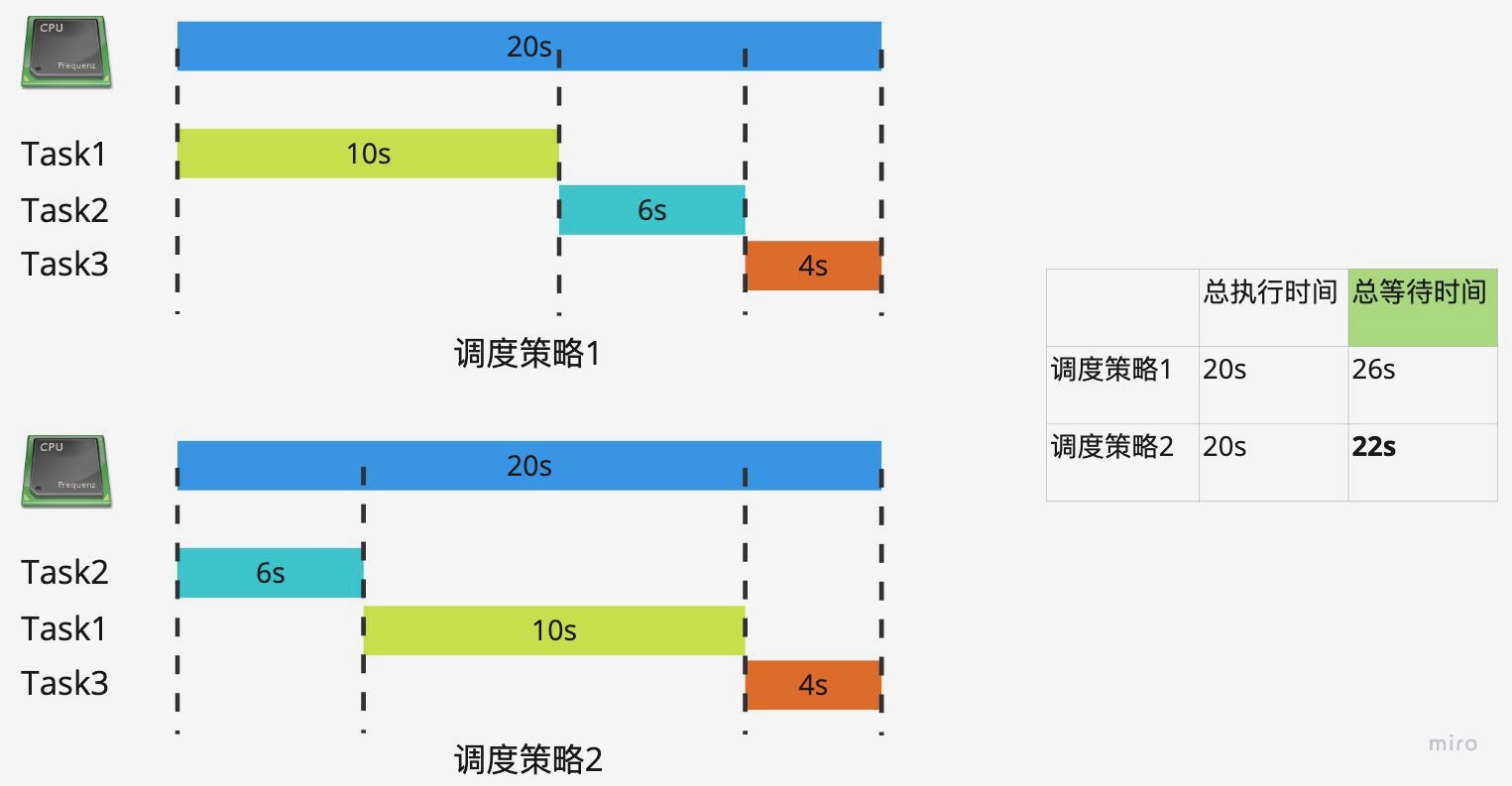
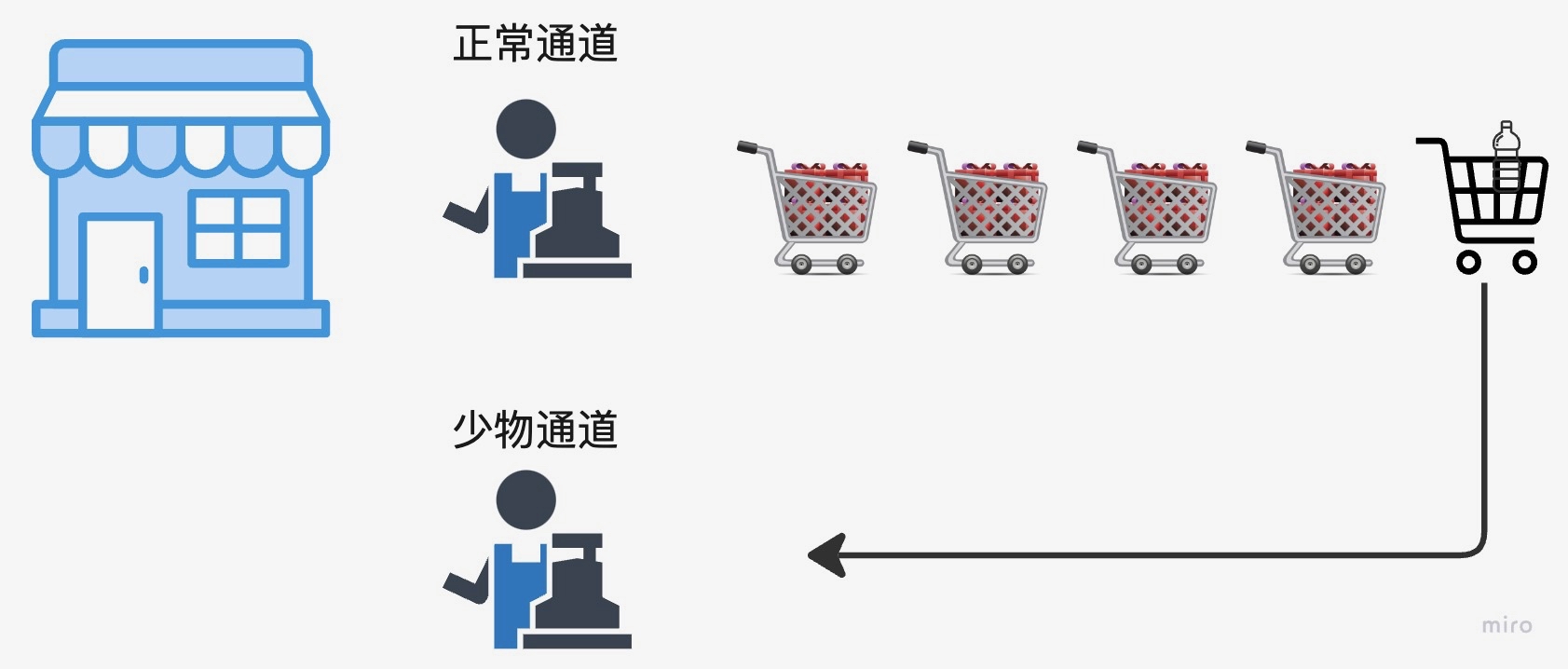
通过上面的例子可以看出,策略1和策略2的CPU总执行时间不变,但是等待时间变少了。也就是说调度系统帮我们减少了任务的总等待时间。超市里经常遇到排队的场景,当只买了少量的东西,和买大量东西的人排一队的时候,可能就会遇到等待时间过长的问题。
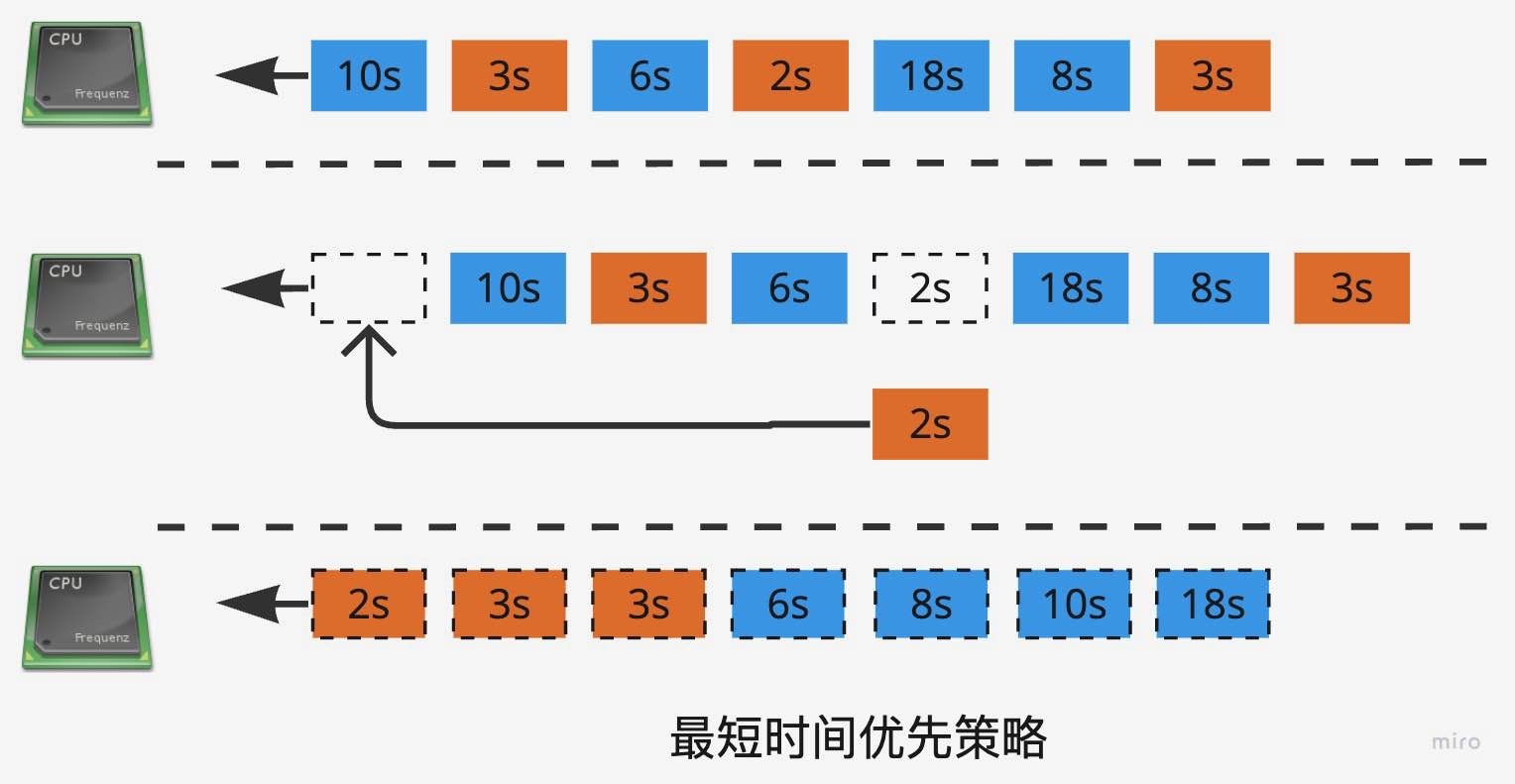
最短时间优先?
回到上面的例子,最优的调度策略诞生了,它就是最短时间优先,每次最短时间的任务优先执行,这样可以保证任务总等待时间最短。
如何保证公平?
可能马上就有人想到了,每次只创建小任务,这样可以保证自己的任务每次都可以插队,被优先执行。但问题来了,这会导致大任务总是得不到执行,一直处于饥饿状态。oh!!! 效率最大化会导致CPU利用的不公平,而我们要兼顾公平。
程序时间可以预知吗?
最短时间优先的策略很棒,但我们忘记了一个重要问题,在任务执行完之前,我们并不知道任务会执行多久!!!策略失效了!!!
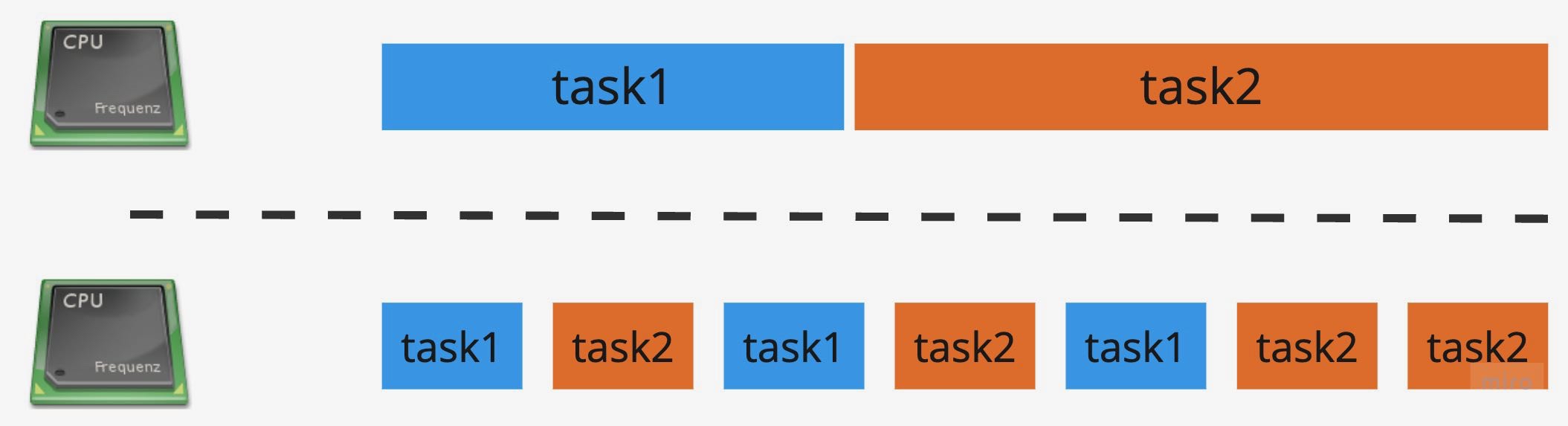
别灰心,有新的方法:时间片轮转。交替执行各个任务,每个任务分配一小段CPU时间,时间用尽则退出,让给其它任务使用。
Tips
要支持时间片轮转,操作系统和硬件配合,实现任务抢占。
Cyber RT的改进
实时操作系统
- 实时操作系统,通过给linux打实时补丁,支持抢占。
- 中断绑定,摄像头,激光雷达,串口等外设需要不停的处理中断,因此可以绑定中断处理程序在一个核上。
Tips
实时操作系统不是万能的。很多人可能会问,假如我有一个实时系统,那么是否意味着任务总是可以按时完成,想法很美好,也符合实时操作系统的定义,但资源是有限的,例如你不可能同时吃饭还喝水。只凭借有限的资源,却能保证完成无限的事情,如果有这样的系统我想它的成就不亚于永动机。因此当程序处理不过来的时候,我们要检查资源是否足够,特别是忙碌的时候。
资源限制&优先级
Cgroup是 Linux 内核的一个特性,用于限制、记录和隔离一组进程的资源使用(CPU、内存、磁盘 I/O、网络等)。Cgroup 具有以下特性:
- 资源限制 —— 您可以配置 cgroup,从而限制进程可以对特定资源(例如内存或 CPU)的使用量。
- 优先级 —— 当资源发生冲突时,您可以控制一个进程相比另一个 cgroup 中的进程可以使用的资源量(CPU、磁盘或网络)。
- 记录 —— 在 cgroup 级别监控和报告资源限制。
- 控制 —— 您可以使用单个命令更改 cgroup 中所有进程的状态(冻结、停止或重新启动)。
pthread_setaffinity_npchoreography_conf {choreography_processor_num: 8choreography_affinity: "range"choreography_cpuset: "0-7" # bind CPU coreschoreography_processor_policy: "SCHED_FIFO" # policy: SCHED_OTHER,SCHED_RR,SCHED_FIFO
协程
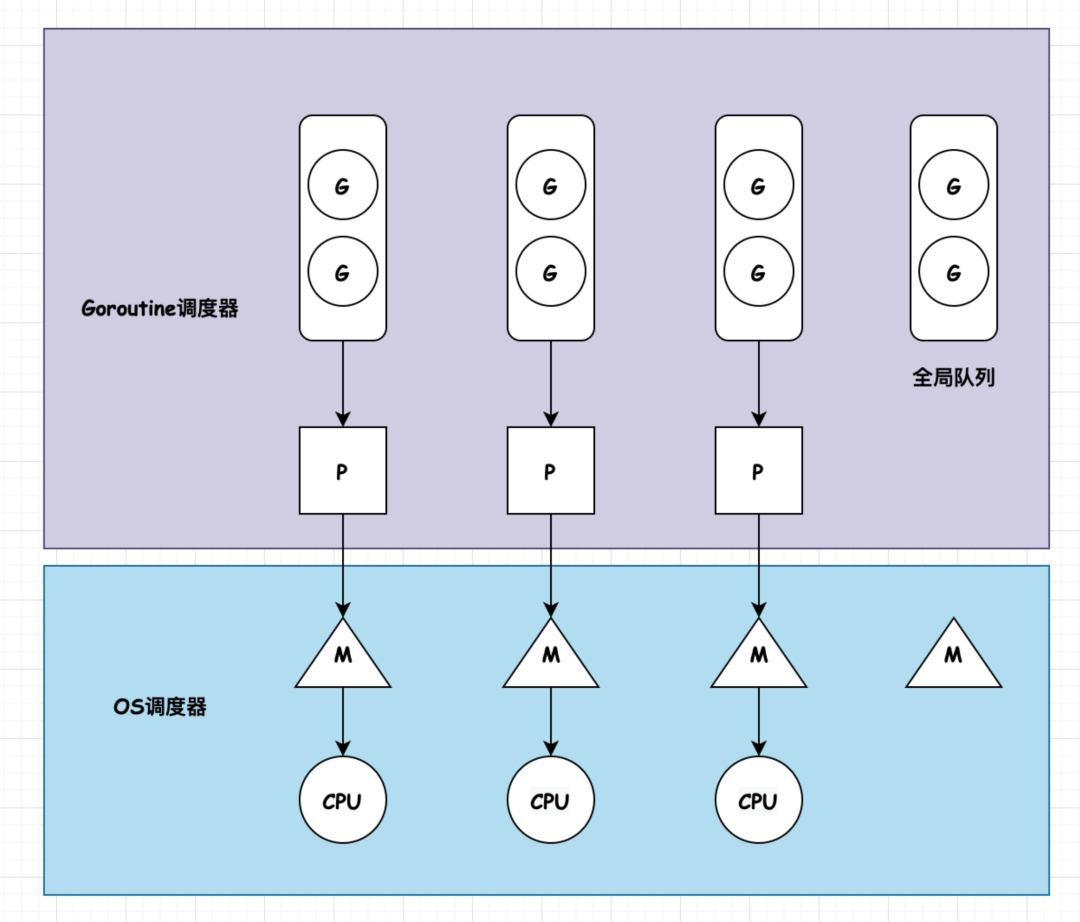
协程。用户态的线程,由用户控制切换。协程的定义可以参考go语言中的GMP 模型
- M,Machine,表示系统级线程,goroutine 是跑在 M 上的。线程想运行任务就得获取 P,从 P 的本地队列获取 G,P 队列为空时,M 也会尝试从全局队列拿一批G放到P的本地队列,或从其他P的本地队列偷一半放到自己P的本地队列。M运行G,G执行之后,M会从P获取下一个G,不断重复下去。
- P,processor,是 goroutine 执行所必须的上下文环境,可以理解为协程处理器,是用来执行 goroutine 的。processor 维护着可运行的 goroutine 队列,里面存储着所有需要它来执行的 goroutine。
- G,goroutine,协程。
协程相对线程的优势
- 系统消耗少。线程的切换用户态->中断->内核态,协程的切换只在用户态完成,减少了系统开销。
- 轻量。协程占用资源比线程少,一个线程往往消耗几兆的内存。
Tips
只能自己yeild,最好不要使用sleep,或者io,不然就会主动休眠
为什么引入协程?因为自动驾驶系统涉及到很多消息传输,因此会导致大量的IO消耗,那么如何减少任务切换带来的开销就显得尤为重要。引入协程可以减少任务切换带来的开销,从而提高程序的效率。在自动驾驶系统中,大量的IO消耗会使得系统性能下降。通过使用协程,可以将系统的IO操作和非IO操作分别处理,减少任务切换的次数,从而提高系统的响应速度和效率。此外,使用协程还可以简化代码结构,提高代码的可读性和可维护性。在自动驾驶系统中,涉及到大量的数据的处理和传输,如果使用传统的多线程编程方式,将会使得代码结构复杂,难以维护。而使用协程可以将代码结构简化,使得代码更加清晰易懂,从而提高代码的可读性和可维护性。综上所述,引入协程可以减少任务切换带来的开销,提高系统的响应速度和效率,同时也可以简化代码结构,提高代码的可读性和可维护性。
Cyber RT调度策略
多优先级队列
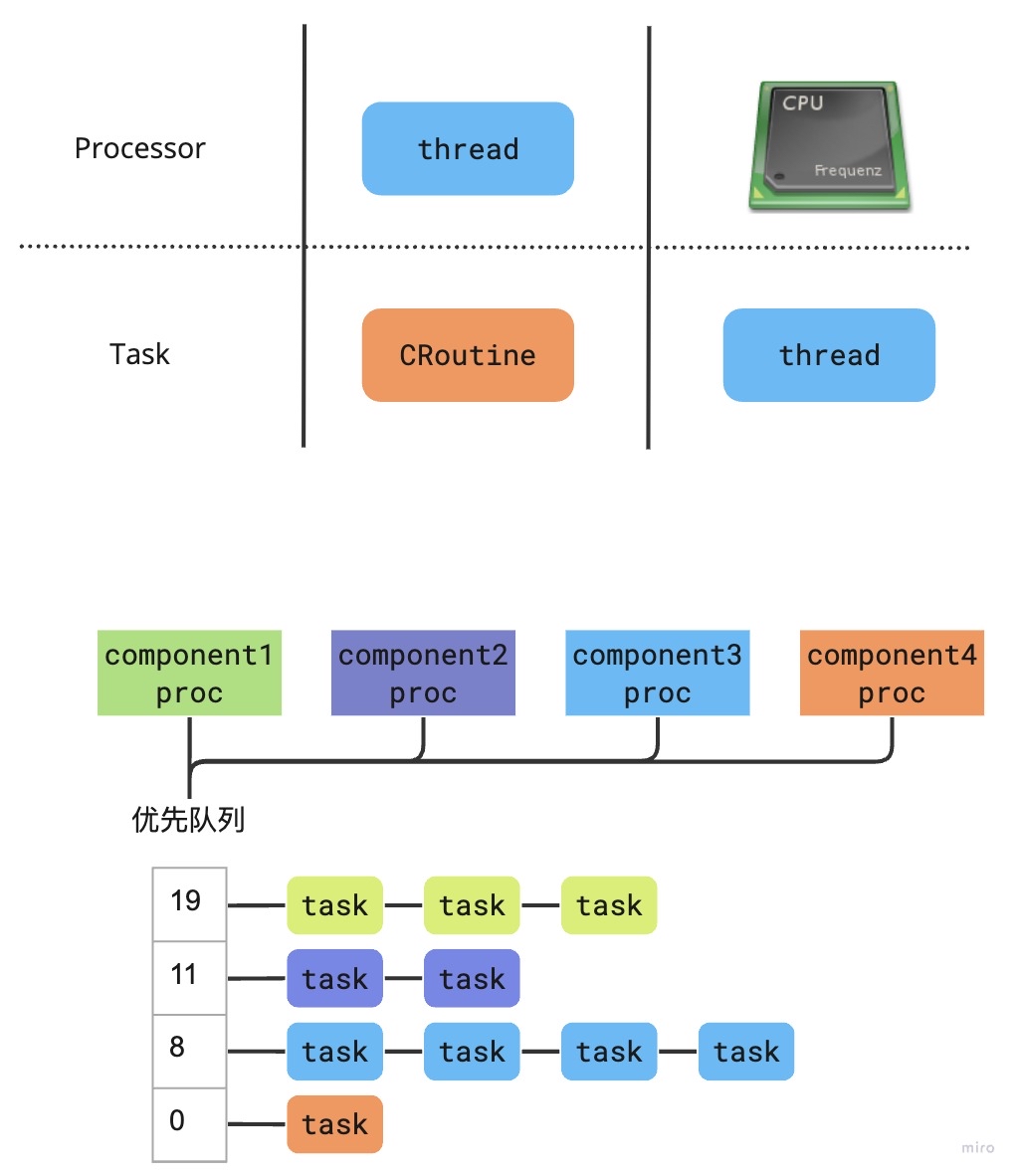
对应到GMP模型,Cyber的每个任务都被视为一个协程,协程在线程上运行,并且可以设置协程的优先级。协程通过一个多优先级队列来管理,每次从优先级最高的协程开始执行。
任务窃取
有意思的是有些Processor上的任务分配的比较少,有些Processor上的任务可能分配的比较多,这样会导致一些Processor闲置,而另一些则处于饱和状态。为了提高效率,空闲的Processor会从饱和的Processor上偷取一半的任务过来执行,从而提高CPU利用率。
二种任务类型
组件
组件是Apollo中的最小执行单元,每个组件对应某一项特定的任务,例如定位、控制。多个组件联合起来可以实现更加复杂的功能,例如感知。Apollo一共有2种类型的组件:消息触发型和定时触发型。
class CommonComponentSample : public Component<Driver> {public:bool Init() override;bool Proc(const std::shared_ptr<Driver>& msg0) override;};CYBER_REGISTER_COMPONENT(CommonComponentSample)
自定义任务
如果在程序中想启动新的任务并发处理,可以使用cyber::Async接口,创建的任务会在协程池中由cyber统一调度管理。
class Foo {public:void RunOnce() {auto res = Async(&Foo::Task, this, 10);EXPECT_EQ(res.get(), 10);}uint32_t Task(const uint32_t& input) { return input; }};
Tips
手动创建的线程并没有设置cgroup,因此最好不要手动创建线程,如果有需要可以通过cyber配置来设置cgroup。
Cyber调度实践
实验目的:学习如何设置Cyber的调度策略,任务优先级。实验步骤:
- 修改
cyber/conf/example_sched_choreography.conf中的配置 - 启动
./bazel-bin/cyber/examples/common_component_example/channel_prediction_writer发送消息 - 启动
cyber_launch start cyber/examples/common_component_example/common.launch,其中包括2018个组件,用于消费消息。
实验结果:优先级高的组件优先执行。
[example_sched_choreography] I0729 17:24:05.018-05695618 common_component_example.cc:31] [mainboard]Name: common3[example_sched_choreography] I0729 17:24:05.112421 30730 common_component_example.cc:38] [mainboard]Start common component Proc [5][example_sched_choreography] I0729 17:24:05.112481 30730 common_component_example.cc:31] [mainboard]Name: common1[example_sched_choreography] I0729 17:24:05.147213 30730 common_component_example.cc:38] [mainboard]Start common component Proc [5][example_sched_choreography] I0729 17:24:05.147259 30730 common_component_example.cc:31] [mainboard]Name: common0[example_sched_choreography] I0729 17:24:05.175976 30730 common_component_example.cc:38] [mainboard]Start common component Proc [5][example_sched_choreography] I0729 17:24:05.176030 30730 common_component_example.cc:31] [mainboard]Name: common2[example_sched_choreography] I0729 17:24:05.207996 30730 common_component_example.cc:38] [mainboard]Start common component Proc [5]
Cyber调度配置
配置文件
cyber的调度配置在cyber/conf/example_sched_choreography.conf中,通过更改配置可以设置任务的优先级,绑定的核心等。
scheduler_conf {policy: "choreography"process_level_cpuset: "0" # all threads in the process are on the cpusetchoreography_conf {choreography_processor_num: 4choreography_affinity: "range"choreography_cpuset: "0"choreography_processor_policy: "SCHED_FIFO" # policy: SCHED_OTHER,SCHED_RR,SCHED_FIFOchoreography_processor_prio: 10pool_processor_num: 4pool_affinity: "range"pool_cpuset: "0"pool_processor_policy: "SCHED_OTHER"pool_processor_prio: 0tasks: [{name: "common0"processor: 0prio: 1},{name: "common1"processor: 0prio: 2},{name: "common2"processor: 0prio: 3},{name: "common3"processor: 0prio: 4},]}}
cyber_launch文件
<cyber><module><name>common</name><dag_conf>/apollo/cyber/examples/common_component_example/common0.dag</dag_conf><dag_conf>/apollo/cyber/examples/common_component_example/common1.dag</dag_conf><dag_conf>/apollo/cyber/examples/common_component_example/common2.dag</dag_conf><dag_conf>/apollo/cyber/examples/common_component_example/common3.dag</dag_conf><process_name>example_sched_choreography</process_name></module></cyber>
DAG文件
# Define all coms in DAG streaming.module_config {module_library : "/apollo/bazel-bin/cyber/examples/common_component_example/libcommon_component_example.so"components {class_name : "CommonComponentSample"config {name : "common0"readers {channel: "/apollo/prediction"}}}}
组件
#include "cyber/examples/common_component_example/common_component_example.h"#include <bits/stdc++.h>#include "cyber/croutine/croutine.h"using apollo::cyber::croutine::CRoutine;bool CommonComponentSample::Init() {AINFO << "Commontest component init";return true;}bool CommonComponentSample::Proc(const std::shared_ptr<Driver>& msg0) {if (CRoutine::GetCurrentRoutine() != nullptr) {AINFO << "Name: " << CRoutine::GetCurrentRoutine()->name();}// calculate taskint i = 1000000;while (i) {log(i);--i;}AINFO << "Start common component Proc [" << msg0->msg_id() << "]";return true;}
指定线程优先级
上面说到了指定线程的优先级,最好由cyber统一管理。
scheduler_conf {policy: "choreography"process_level_cpuset: "0" # all threads in the process are on the cpusetthreads: [{name: "lidar"cpuset: "1"policy: "SCHED_RR" # policy: SCHED_OTHER,SCHED_RR,SCHED_FIFOprio: 10}, {name: "shm"cpuset: "2"policy: "SCHED_FIFO"prio: 10}]choreography_conf {choreography_processor_num: 8choreography_affinity: "range"...}
参考资料
- cpuset
- GMP模型
- GMP模型
- 什么是协程