

第五章:使用Cyber RT进行相机仿真
实验内容
现需要实现车辆跟踪功能,摄像头以图片的方式采集到了道路信息,并在车流中锁定目标车辆,然后需要截取目标车辆所属的局部图片信息,再以话题的方式发布出去,请问应该如何实现?
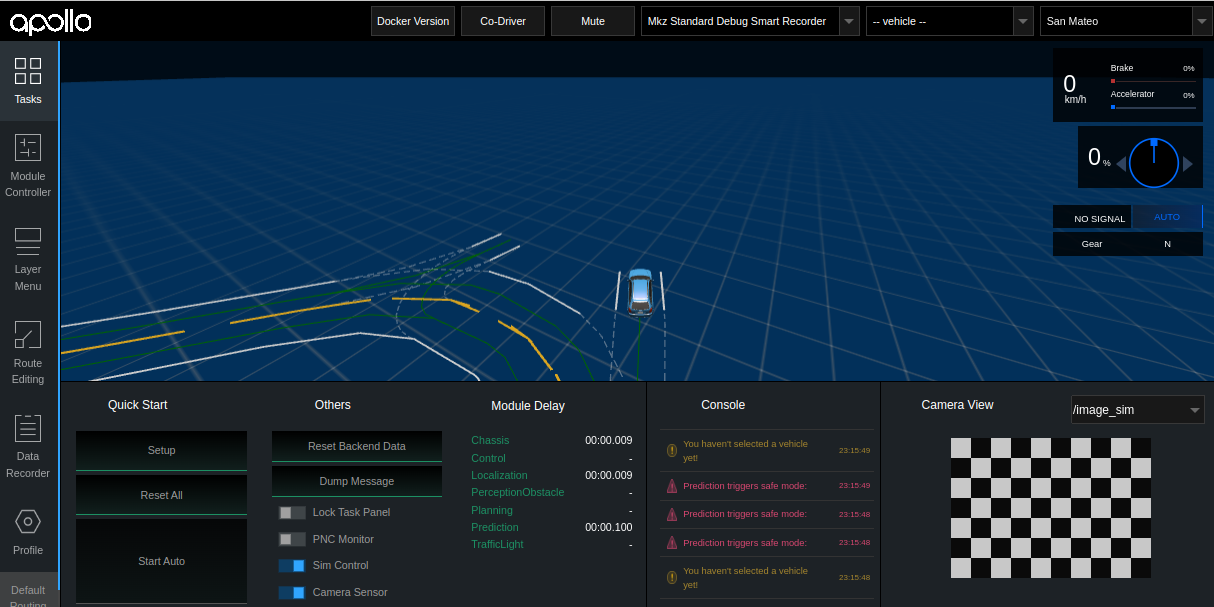
因此本实验编写程序模拟摄像头驱动,要求该驱动可以发布仿真图像数据。并在DreamView中显示图像,结果如下图所示仿真了一张棋盘图片:
实验目的
该需求是一个典型的发布订阅实现,发布方是自实现程序,订阅方是DreamView,而被传输的数据则是图片消息,因此,该案例涉及的核心点有三个需要学习:
- 如何编写话题发布方?
- 如何组织图片消息?图片消息需要自定义吗?消息格式是怎样的?
- 如何使用DreamView显示订阅到的图片消息?
实验流程
在前面的教程中,我们已经系统性的学习过CyberRT的通信机制了,这其中就包含话题发布实现。而图片消息作为极其常用的一种消息载体,Apollo中已经内置了相关proto文件,我们直接调用即可。dremview作为一款可视化工具,我们只需了解并掌握其相关操作方式即可。该案例实现流程如下:
1. 安装DreamView;
2. 搭建项目框架;
3. 编写程序主逻辑;
4. 构建执行程序,并使用DreamView查看结果。
<1> 安装DreamView;
<2> 搭建项目框架;
2-1.创建工程目录,工程目录创建如下所示:
camera_demo|-- driver|-- camera_sim| |-- BUILD| |-- camera_driver.cc|--BUILD|--camera_demo.BUILD|--cyberfile.xml
2-2.编辑包管理相关配置文件
包管理相关配置文件主要指camera_demo下的BUILD、camera_demo.BUILD以及cyberfile.xml。在BUILD文件中请输入如下内容:
load("//tools/install:install.bzl", "install", "install_src_files")install(name = "install",data = ["camera_demo.BUILD","cyberfile.xml",],deps = ["//camera_demo/driver/camera_sim:install",],)install_src_files(name = "install_src",src_dir = ["."],dest = "camera_demo/src",filter = "*",deps = ["//camera_demo/driver/camera_sim:install_src",])
在cyberfile.xml中输入如下内容:
<package><name>camera_demo</name><version>1.0.0</version><description>camera_demo</description><maintainer email="ad-platform">[email protected]</maintainer><type>module</type><src_path>//camera_demo</src_path><license>BSD</license><author>Apollo</author><depend type="binary" repo_name="cyber">cyber-dev</depend><builder>bazel</builder></package>
2-3.编写源文件以及BUILD文件
在 camera_driver.cc 中请输入如下内容:
#include <cyber/cyber.h>int main(int argc, char const *argv[]){apollo::cyber::Init(argv[0]);AINFO << "相机仿真案例!";return 0;}
在 BUILD 文件中,请输入如下内容:
2-4.测试
2-4.编译文件
在apollo_workspace目录下执行buildtool编译指令。
编译完成后,系统会在/opt/apollo/neo/bin目录下生成可执行文件camera_driver。
2-5.运行可执行文件
为了可以在终端输出运行日志,请先调用如下指令:
然后调用如下指令进入/opt/apollo/neo/bin/目录并执行可执行程序:
如果终端能够正常输出日志信息,说明框架搭建完毕。
<3> 编写程序主逻辑;
3-1. 修改 camera_driver.cc 为如下内容:
3-2. 修改 BUILD 文件,要在 cc_binary 中添加图片相关 proto 依赖,修改后如下所示:
<4> 构建执行程序,并使用DreamView查看结果。
程序编写完毕,具体运行步骤如下:
4-1. 请首先参考第2-4 、2-5所示,编译并运行程序。
4-2. 打开新的终端,启动DreamView:
4-3. 在浏览器中输入http://localhost:8888,访问 DreamView:
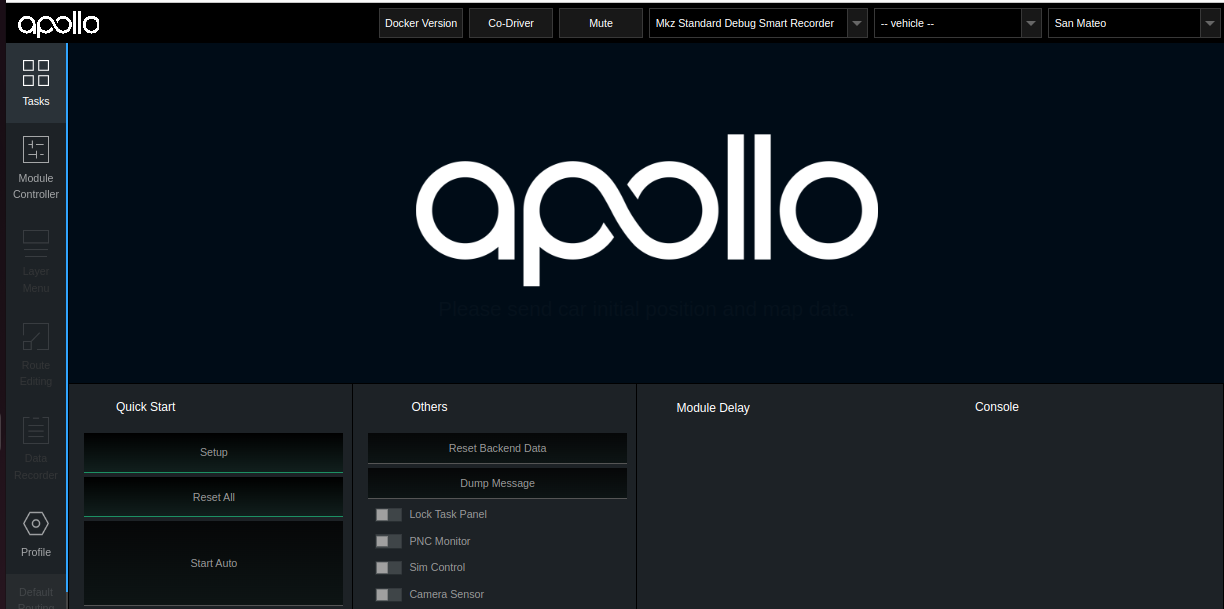
4-4. 然后做如下操作:
- 打开 Sim Control 按钮;
- 打开 Camera Sensor 按钮;
- 右侧的 Camera View 面板中打开话题下拉列表并设置为 /image_sim,则将显示图片信息,如下图:
至此,实验结束。
