国内L4级智驾技术降维到L2+的量产高阶辅助驾驶,提供安全安心、有真实获得感的智能驾驶全场景体验

Apollo City Driving Max
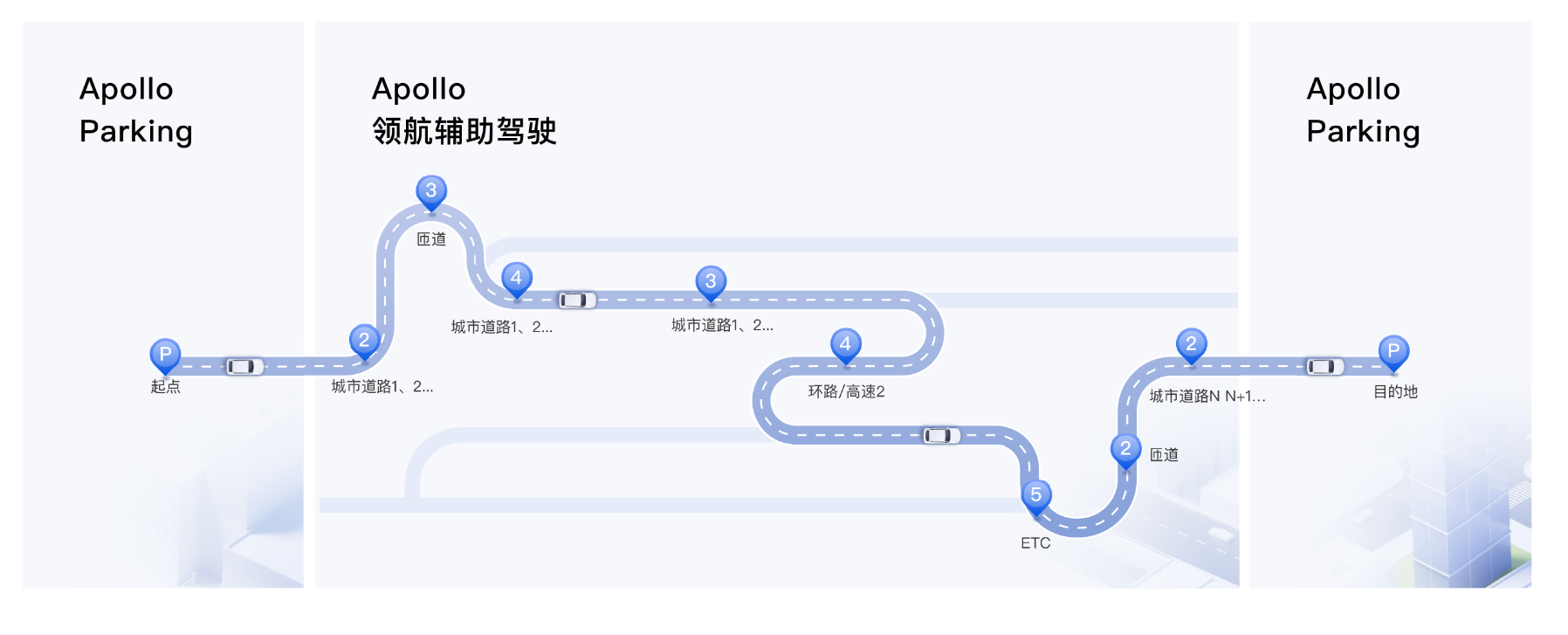
Apollo Highway Driving Pro
Apollo Parking
实现高速、城市快速路、城市、停车场全场景点到点的全域驾驶,具备识别异形红绿灯,环岛路口、非结构化道路等,灵活的驾驶策略可从容面对路口博弈、汇入汇出、行人礼让等场景,将用户从复杂的驾驶任务中解放,让出行变得高效舒适。
覆盖高速、城市快速路、停车场场景,在保证量产成本可控的同时实现高速点到点的驾驶自由,让长途驾驶变得更轻松。
全场景自主泊车,无论泊入还是召唤,无需人在车上,手机一键操作,即可实现泊车自由


Robotaxi千万级数据复用,30万公里泛化测试、车规级研发,仿真和实车测试的严格质量保证


「三盒变一盒」一个域控硬件盒子实现了行车域控+泊车盒子+地图盒子的功能


自研人机共驾地图和HMI泊车一体化还原超现实行泊场景,体感兼顾效率与舒适,高速和城市快速路点到点全场景覆盖
继承百度L4技术,算法经过5000+万公里专业路测验证,采用纯视觉和激光雷达两套系统独立运作的真冗余感知方案

专为智驾定制的「轻量级高精地图」,结合百度导航地图,提供最熟路的驾驶获得感
配套工具链具备丰富的L4数据闭环的实践经验,助力车企用数据持续优化产品体验

从泊车域到全域智驾提供多样化的解决方案

行泊一体硬件实现多传感器融合复用SOA软件架构全面开放支持高度个性化

200+指标为质量和体验「保驾护航」

舱驾云图一体数据闭环可降低联调成本缩短量产时间
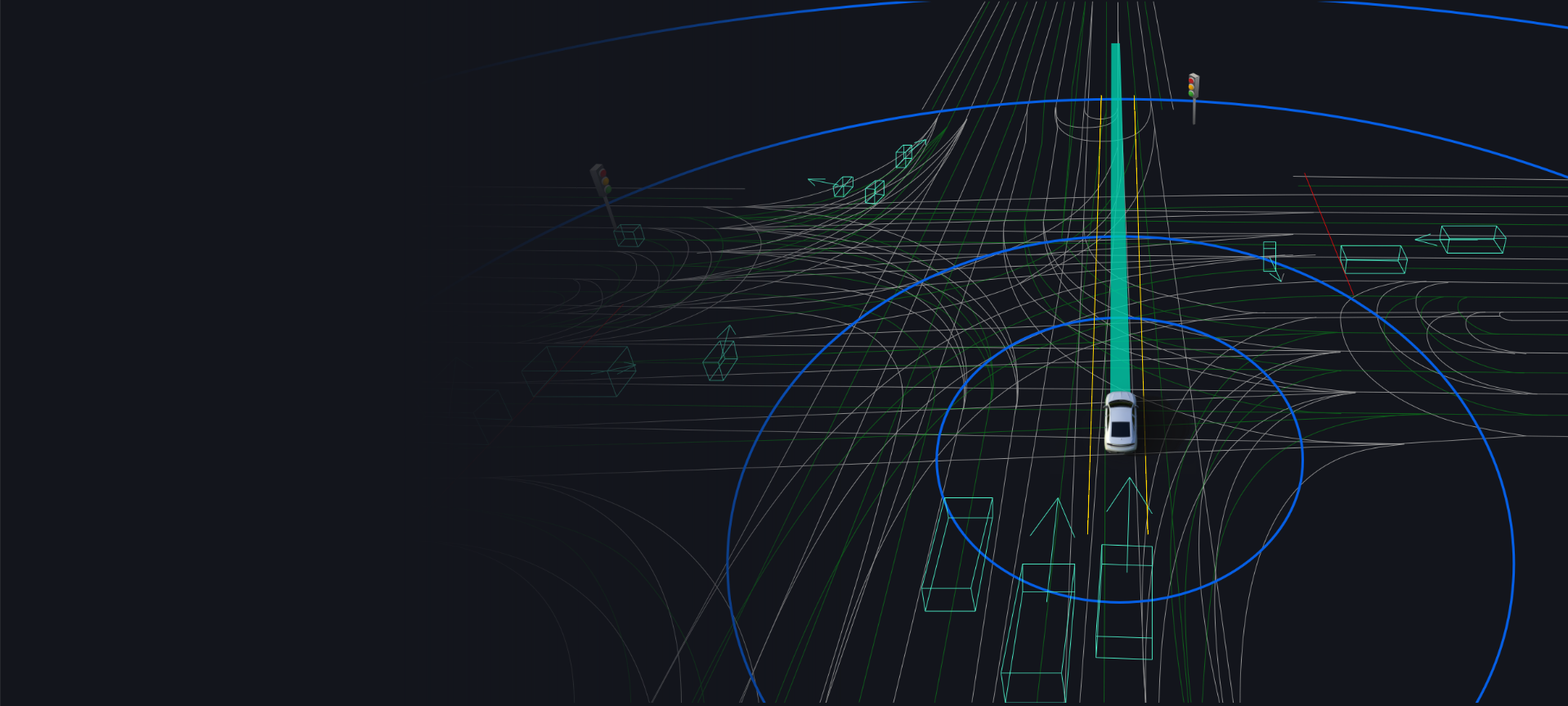
Apollo车路一体BEV感知方案——UniBEV,帮助智能汽车拥有“千里眼”,感知能力360度无死角。
车路一体的端到端感知解决方案,支持多传感器、多模态、多任务、时序融合等端到端感知能力,也是自动驾驶和车路协同的重要底层方案。
具备端到端、多任务多模态融合感知和车路一体三大特点。UniBEV 车路一体大模型,借助了大数据+大模型+小型化技术闭环,在车端路侧的动静态感知任务上都表现卓越,让聪明的车和智慧的路可以更好的协同发展。

— 敬请期待 —


关闭
关注我们:





扫码关注
©2022 Baidu丨由百度智能云 提供计算服务丨京ICP证030173号







